网站关停怎么做黄金路网站建设公司
“最近的期末展示需要制作一个PPT,我熬了几个大夜才完成了,但是不知道怎么的我在删除其他文件时不小心把这个PPT一起删掉了,有什么方法可以帮我找回这个误删的PPT吗?”
我们在工作和学习中,经常都需要使用到PPT,它不仅可以更好的将我们的想法以画面的形式展现,也可以让我们在演讲时更有感染力。但是PPT的制作也并非简单,如果我们辛辛苦苦完成的PPT被误删,这真的会让人很崩溃!
删除的PPT怎么找回来呢?小编来给大家分享几个比较常用的方法吧,有需要的朋友可以继续往下看哦!

方法一:从回收站恢复删除的PPT
误删的PPT怎么找回来?每次误删文件时,大家应该最先想到的就是回收站吧!没错,如果我们不小心删除了重要的PPT文件,可以先尝试从回收站恢复它们,这个方法是操作起来最简单的,如下。
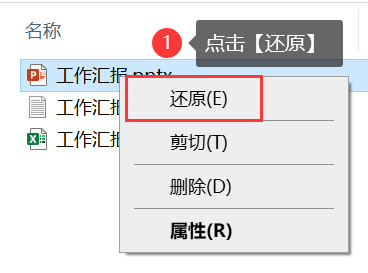
1.双击图标进入【回收站】;
2.查找并选择需要恢复的PPT文档,单击右键选择【还原】。
方法二:使用备份与恢复功能恢复删除的PPT
刚刚删除的PPT怎么找回?如果在使用PPT时,你开启了功能,可以尝试使用备份与恢复功能来恢复删除的PPT。操作如下。
1.点击进入PPT中,选择【文件】;
2.找到【打开】,点击【浏览】,找到需要恢复的文件(一般以【~】开头的文件的是自动恢复文件);
3.找到需要恢复的文件后,将其重命名,改为【.pptx】;
4.双击打开文件,将其保存。

方法三:使用备份文件恢复PPT
PPT删除后怎么找回来?如果是比较重要的PPT,或者是小组共享的PPT,或许会有备份,此时只需要将备份复制到电脑上,就可以简单的恢复PPT文件了。

方法四:使用软件恢复PPT
如果尝试了很多方法后仍然无法找回PPT文件怎么办?删除的PPT怎么找回来呢?建议大家下载一个 数 据 蛙 恢 复 专 家,这是一款比较值得信赖的数据恢复软件。它支持多种数据(文档、图片、视频、音频、电子邮件等)、多种设备(电脑磁盘、回收站、优盘、移动硬盘、内存卡等)的扫描与恢复。
并且有免费试用的机会,如果不确定您的数据还能否恢复,可以先使用软件进行免费扫描哦。同时,在数据丢失后越早使用软件,数据被扫描到的机会会更大,以下是软件的操作步骤。
操作环境:
演示机型:神舟战神G9-CU7PK
系统版本:Windows10
软件版本:数 据 蛙 恢 复 专 家3.1.6
1.安装完软件后运行它,点击【免费试用】关闭注册窗口;
2.恢复PPT文件的用户勾选上【文档】,并勾选上需要扫描的磁盘,单击执行【扫描】操作;

3.第一次快速扫描结束后,可以先对部分PPT文件进行查看,可以通过PPT的名称对文件进行定位,如果没有找到需要恢复的文档,点击【深度扫描】;
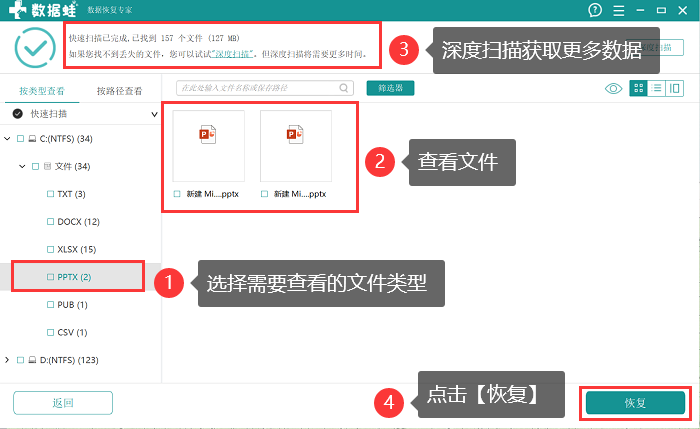
4.深度扫描完成后,所呈现的PPT文件会比较多,可以切换查看方式,也可以在【筛选器】中快速定位文件,完成选择后,点击【恢复】。
提示:在选择文件保存位置时,应该选择一个与原先的保存位置有所区别的其他位置。

我们平常经常会用到PPT,如果PPT被误删了,我们应该先停止写入新的数据,然后尝试使用正确的方法来恢复PPT。删除的PPT怎么找回来呢?上文小编介绍的这几个方法都是比较常用的,需要恢复PPT文件的朋友现在就可以进行尝试啦!
往期推荐:
磁盘空间不足怎么清理?记好这3招!![]() https://blog.csdn.net/datarecover/article/details/134112245?spm=1001.2014.3001.5501
https://blog.csdn.net/datarecover/article/details/134112245?spm=1001.2014.3001.5501
PDF文件恢复?记住这3个就够了!![]() https://blog.csdn.net/datarecover/article/details/134113608?spm=1001.2014.3001.5501
https://blog.csdn.net/datarecover/article/details/134113608?spm=1001.2014.3001.5501
误删文件恢复怎么做?简单方法大放送!![]() https://blog.csdn.net/datarecover/article/details/134048456?spm=1001.2014.3001.5501
https://blog.csdn.net/datarecover/article/details/134048456?spm=1001.2014.3001.5501