权威的大连网站建设云seo
目录
基础数据类型
1.number
字面量声明
数字对象方式声明
整数判断
指定返回小数位数
NaN-表示非数字值
浮点精度
解决误差
String
字面量声明
数字对象声明
连接运算符
获取长度
大小写转换
转换成大写
转换成小写
编辑
移除空白
获取单字符
编辑
截取字符串
编辑
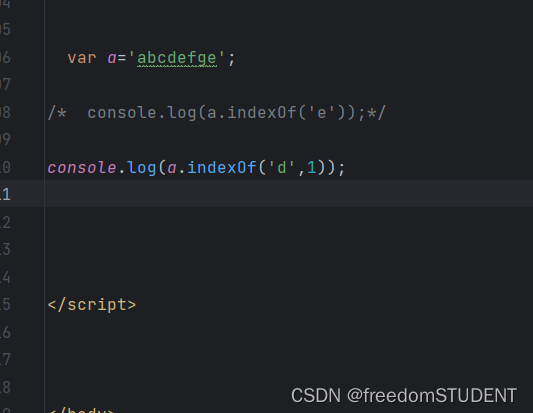
查找字符串
替换字符串
类型转换
Boolean(布尔值)
字面量声明
隐式转换
string
Number
数组不参与比较的时候
空数组与Boolean比较时
undefined,null,symbol
undefined与null基本同义
null是一个表示"无"的对象,转为数值时为0
打印null的数据类型
undefined是一个表示"无"的原始值,转为数值时为NaN
数值与undefined相加得NaN
undefined(尚未赋值)
变量声明但是没有赋值
函数没有返回值时,默认返回undefined
null
symbol
编辑
基础数据类型
Number String Boolean Undefined Null Symbol
数据保存在栈内存⾥
1.number
字面量声明

数字对象方式声明


整数判断


指定返回小数位数


NaN-表示非数字值
是数字值则返回false,反之返回true


浮点精度


js语言在浮点数计算上会有精度误差问题
解决误差


String
字面量声明

数字对象声明

连接运算符




获取长度


大小写转换
转换成大写


转换成小写


移除空白

移除前后对比

获取单字符


截取字符串


slice(1,4)意思是从字符串第一个字符开始截取,截取到第四个字符
字符串从0开始,及asdfg 第一个字符为s,第四个字符为g,但不打印
即slice(start(打印),end(不打印))
查找字符串


查找某个字符,从第几个字符开始找

替换字符串


类型转换




Boolean(布尔值)
字面量声明
声明的时候加引号,打印出来的是字符串类型


声明的时候不加引号,打印出来的是布尔类型


隐式转换
true | false | |
| String | 非空字符串 | 空字符串 |
| Number | 非0的数值 | 0/NaN |
| Array | 数组不参与比较时 | 参与比较的空数组 |
| Object | ✅ | |
| undefined | ✅ | |
| null | ✅ | |
| NaN | ✅ |
string


Number

数组不参与比较的时候


空数组与Boolean比较时


数组之间参与比较


当其他类型与Boolean类型对比时,会将其他类型先转换为数值类型再对比
undefined,null,symbol
undefined与null基本同义


null是一个表示"无"的对象,转为数值时为0


打印null的数据类型
面试的时候可能会问到null是一个什么类型的


对象型的
undefined是一个表示"无"的原始值,转为数值时为NaN


数值与undefined相加得NaN


undefined(尚未赋值)
变量声明但是没有赋值

函数没有返回值时,默认返回undefined


null
null表示"没有对象",即该处不应该有值。
用法:(1) 作为函数的参数,表示该函数的参数不是对象(2) 作为对象原型链的终点
Object.getPrototypeOf(Object.prototype) // null
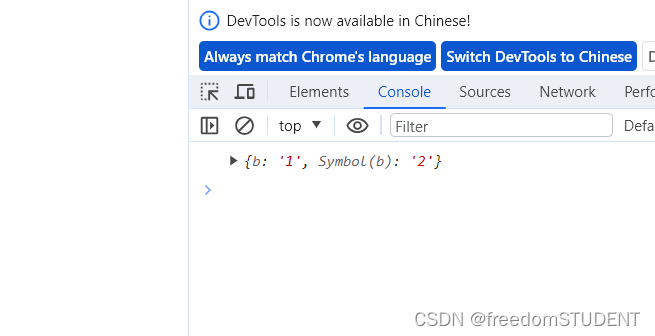
symbol

假设定义了一个a变量
在a的变量定义了一个b属性,并且给b属性赋值了一个字符串1
假设再b赋值一个2

结果未达到预期,
在一个对象中需要增加一个相同的属性名