php音乐网站设计开发一个app有多难
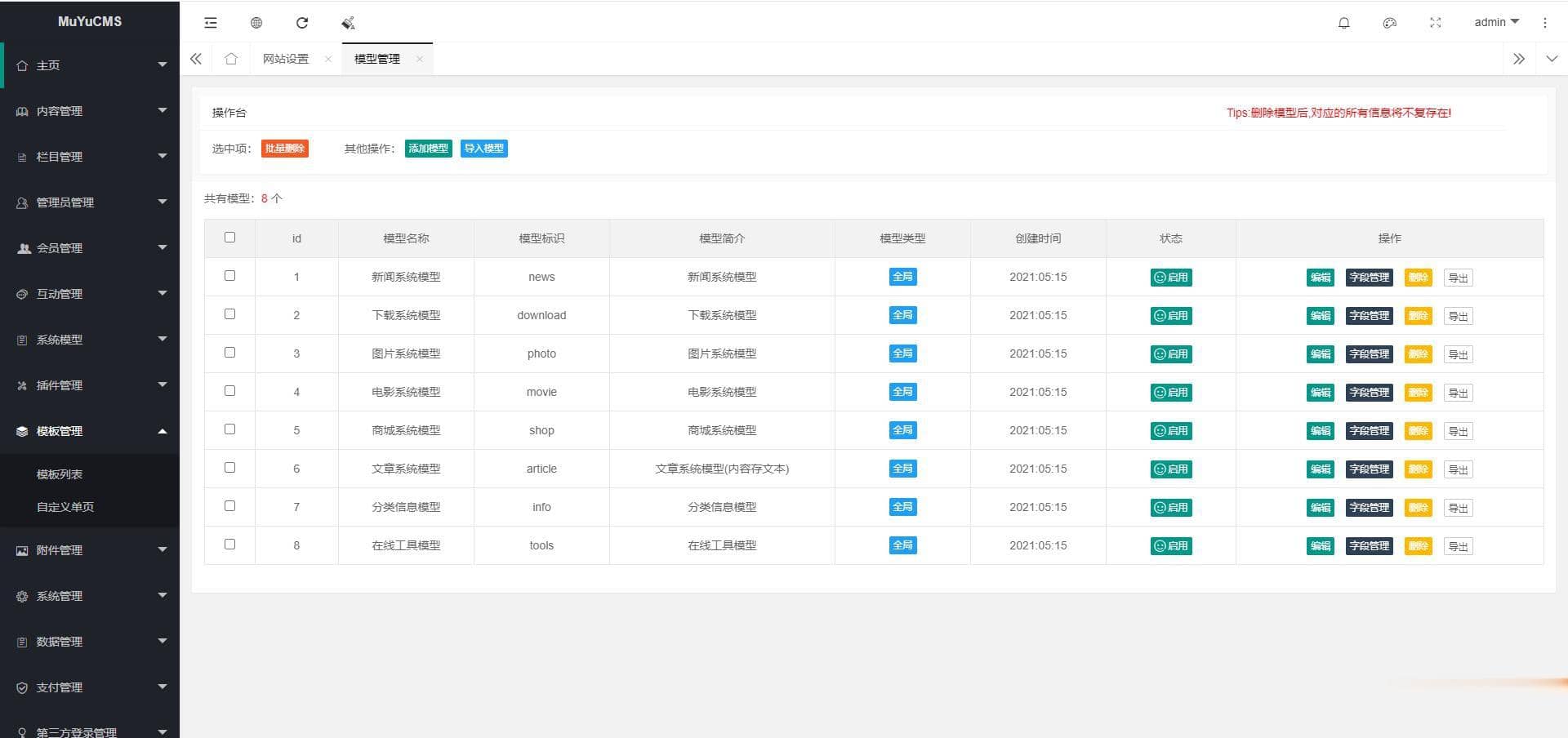
MuYuCMS:一款基于Thinkphp开发的轻量级开源内容管理系统,为企业、个人站长提供快速建站解决方案。它具有以下的环境要求:
支持系统:Windows/Linux/Mac
WEB服务器:Apache/Nginx/ISS
PHP版本:php >= 5.6 (推荐php5.6)
数据库:MySQL >= 5.6 (推荐MySQL5.6)
下面是该系统的安装教程:
将MuYuCMS代码下载到您网站的根目录。
运行安装文件 /install。
请注意,不要将安装文件放在子目录里,因为这可能会导致安装出现问题。
默认情况下,后台入口文件是 /admin.php。
通过以上简单的步骤,您就可以轻松安装和配置MuYuCMS内容管理系统。该系统不仅易于使用,而且还具有优秀的性能和可靠的稳定性。无论是企业用户还是个人站长,都可以使用MuYuCMS快速构建高质量的网站。
源码下载:https://download.csdn.net/download/m0_66047725/88522004
源码下载2:关注我留言