北京网站的建设做网站怎么收费的
注1:本文系"概念解析"系列之一,致力于简洁清晰地解释、辨析复杂而专业的概念。本次辨析的概念是:ROC曲线的含义和绘制
概念解析 | ROC曲线:评估分类模型
第一部分:通俗解释
在我们的日常生活中,经常会遇到需要做出判断和选择的情况。比如,当你收到一封邮件时,你需要判断它是否是垃圾邮件;当你在网上购物时,你需要判断某个商品的评价是真实的还是虚假的。在这些场景中,我们其实就是在扮演一个“分类模型”的角色,试图将事物归入正确的类别。
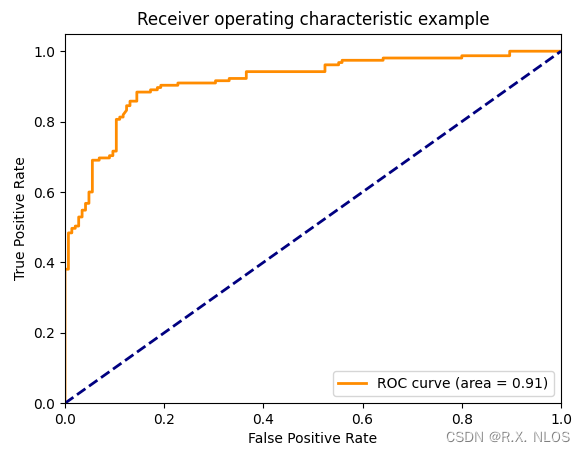
那么,我们如何评估一个分类模型的性能呢?这就要请出我们今天的主角:ROC曲线。ROC曲线就像是一面魔镜,能够照出一个分类模型的真实面目。它通过考察模型在不同阈值下的表现,来全面评估模型的优劣。
具体来说,ROC曲线绘制了真正例率(TPR)和假正例率(FPR)之间的关系。TP