优秀企业网站建设定制wordpress动画
环境:tensorflow2 kaggle
这几天突发奇想,用深度学习训练2次函数。先在网上找找相同的资料这方面资料太少了。大多数如下:
 。
。
给我的感觉就是,用深度学习来做,真的很容易。
网上写出代码分析的比较少。但是也找到了一篇,写的言简意赅,不过我自已训练时,却发现对训练之外的数据,预测的不好。下面分两部分来阐明这一现像与我的思考。
一、代码复现:
(204条消息) tensorflow2.0实现简单曲线拟合_一只双鱼儿的博客-CSDN博客_tensorflow2 曲线拟合
网络结构如下:
model = tf.keras.Sequential([tf.keras.layers.Dense(10,input_shape=(1,),activation="elu"),tf.keras.layers.Dense(1)
])
该文章效果如下:
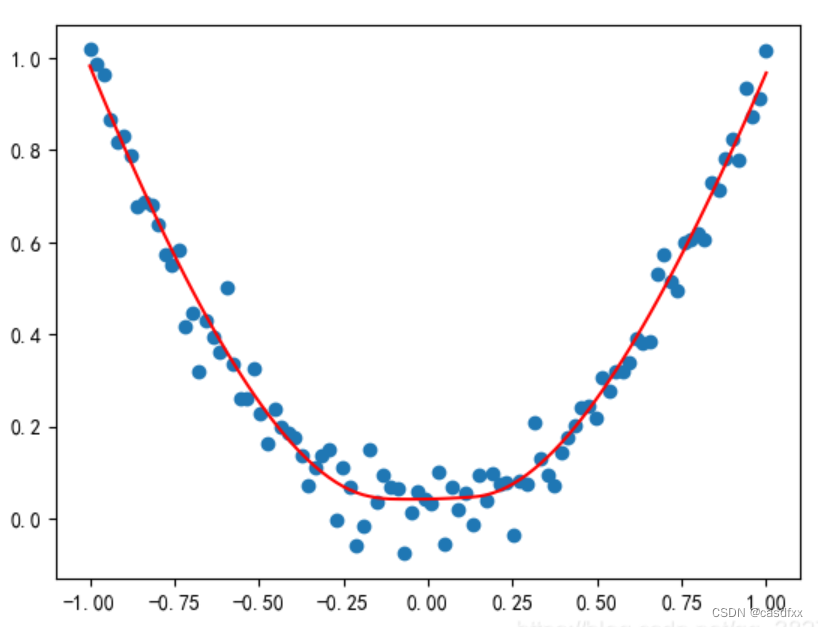
可以看出,在训练集内效果是很好的,但是博主没有使用训练集外的数据。于是我扩展了预测集,效果如下:
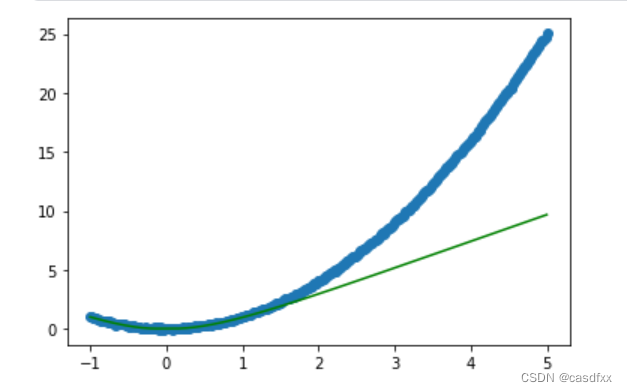
可以发现 ,在[1,5]定义域内,基本就是直线了。
这就很奇怪了,在训练集内是曲线,之外是直线。看网络结构,确实引入了非线性的环节如:activation="elu"。那这个非线性环节究竟有多大用呢?这就引出了第一个问题。
我试着将网络结构改为如下(也就是只保留线性环节):
"""
model = tf.keras.Sequential([tf.keras.layers.Dense(10,input_shape=(1,),activation="elu"),tf.keras.layers.Dense(1)
])
"""
model = tf.keras.Sequential([tf.keras.layers.Dense(1,input_shape=(1,)),tf.keras.layers.Dense(1)
])效果如下:
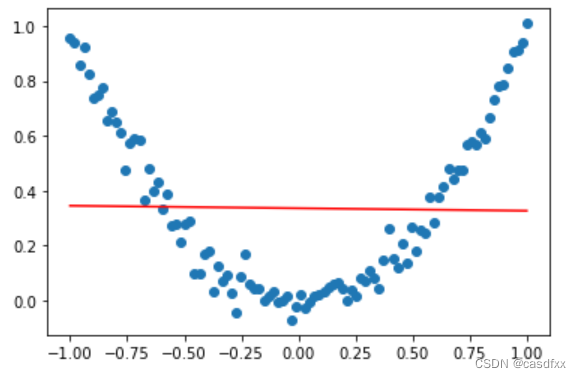
好吧,那第一个问题是解决了。activation="elu"效果是很明显的。
二、为什么在训练集之外,生成了直线?
是过拟合吗?将训练集变成了查表法?
我做了如下实验,这其实是我的第二步(y=ax^2+bx+c+[noise],第一步没保存),用来满足y=x^2已经足够了:
ds_x = []
ds_y = []# 生成数据集
ds_x = np.linspace(-1,1,100)
ds_y = 5*ds_x**2 + 9*ds_x + 300 + np.random.randn(100)*0.05class model_x2(tf.keras.Model):def __init__(self):super(model_x2,self).__init__()self.layer1 = tf.keras.layers.Dense(1)self.layer1_2 = tf.keras.layers.Dense(1)self.layer2 = tf.keras.layers.Dense(1)def call(self,in1):in2 = tf.keras.layers.Multiply()((in1,in1,in1)) #in1 * in1x = self.layer1(in2)x1_2 = self.layer1_2(in1)x2 = tf.keras.layers.concatenate((x,x1_2))out = self.layer2(x2)return outmodel = model_x2()
model.build(input_shape=(None,1))
model.summary()opt = tf.keras.optimizers.Adam(learning_rate=0.01)
los = tf.keras.losses.MeanSquaredError()
acc = tf.keras.metrics.MeanSquaredError()
model.compile(optimizer=opt,loss=los,metrics=acc)model.fit(ds_x,ds_y,epochs=500)#以下就是画图了,将数据集里【-1,1】添加到【-1,3】,多出来的【1,3】示为预测
x = np.linspace(-1,3,20000) #np.array(range(1,100,1))
#y = x**xy_predict = model.predict(x)ds_x = np.linspace(-1,3,100)
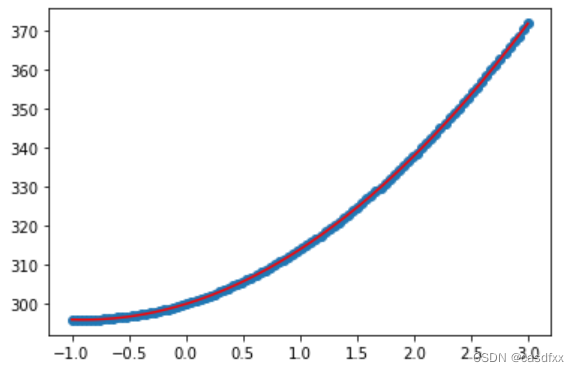
ds_y = 5*ds_x**2 + 9*ds_x + 300 + np.random.randn(100)*0.05plt.scatter(ds_x,ds_y)
plt.plot(x,y_predict,'r')
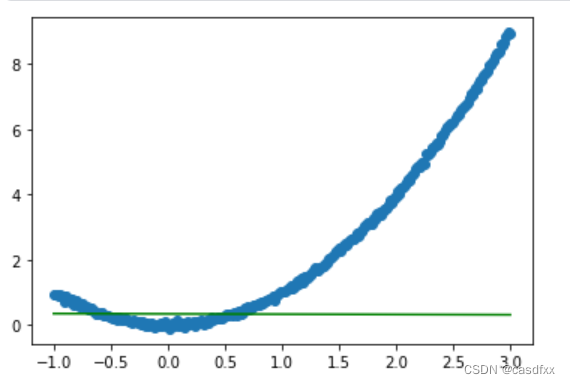
plt.show()#以下就是画图了,将数据集里【-1,1】添加到【-1,3】,多出来的【1,3】示为预测
效果如下:
三、结论:
用深度学习的多层结构,拟合非线性数据???
NO,NO,NO
应该手动引用非线性因子。
这不禁让我想起了曾经的日子,我们都知道3极管可以线性放大,但是有没有一种方式可以产生x^2项。当然是可以的,这就涉及到2极管还是3极管。。。的物理公式如下。。。
知道的小伙伴可以在评论区留言。