网站维护升级访问中建设集团公司简介
1.电脑上安装有git bash
下载链接:https://gitforwindows.org/
-
安装Hyper
下载链接:官网 https://hyper.is/
或者在百度云盘下载:
https://pan.baidu.com/s/1BVjzlK0s4SgAbQgsiK1Eow
提取码:0r1f -
设置
打开Hyper,依次点左上角->Edit->Preferences,如图所示:
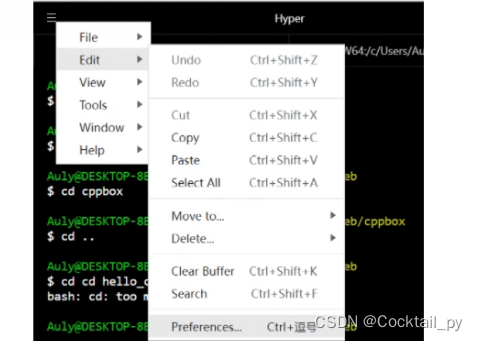
把shell:后面改成git bash的路径,保存文档并关闭

-
使用
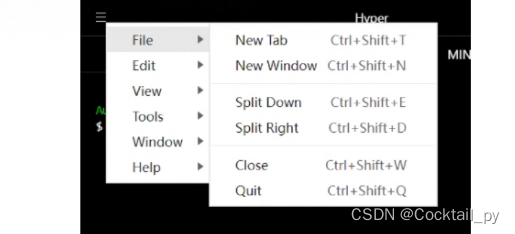
使用如图快捷键或点New Tab,即可呈现文章开头的效果。
怎样让windows的git bash有多个tab窗口 - Hyper