手机版网站原理东阳网站推广
文章目录
- 通过外部中断实现按键捕获代码的实现及分析
- Tip1:函数说明的格式
- Tip2:如何使用CMSIS的延时
- GetTick函数原型
- stm32f407_intr_handle.c解析
- 中断处理函数:void EXTI4_IRQHandler
- 调试流程
- 软件模拟调试
- 两种代码的比较
- 课后作业:
通过外部中断实现按键捕获代码的实现及分析
1 代码的流程分析
2 代码的实现
库函数HAL_Init(void)分析:
HAL_StatusTypeDef HAL_Init(void)
{/* Configure Flash prefetch, Instruction cache, Data cache */
#if (INSTRUCTION_CACHE_ENABLE != 0U) //0U表示无符号整型 0 , 1U 表示无符号整型1 ~0U就是对无符号数0取反。__HAL_FLASH_INSTRUCTION_CACHE_ENABLE();
#endif /* INSTRUCTION_CACHE_ENABLE 允许指令缓存*/#if (DATA_CACHE_ENABLE != 0U)__HAL_FLASH_DATA_CACHE_ENABLE();
#endif /* DATA_CACHE_ENABLE */#if (PREFETCH_ENABLE != 0U)__HAL_FLASH_PREFETCH_BUFFER_ENABLE();
#endif /* PREFETCH_ENABLE *//* Set Interrupt Group Priority 中断优先级分组*/HAL_NVIC_SetPriorityGrouping(NVIC_PRIORITYGROUP_4);/* Use systick as time base source and configure 1ms tick (default clock after Reset is HSI) */HAL_InitTick(TICK_INT_PRIORITY); //初始化系统时钟/* Init the low level hardware 初始化底层硬件(堆栈指针)*/HAL_MspInit(); //使用HAL_Delay延时/* Return function status */return HAL_OK;
}
Tip1:函数说明的格式
/****************
*函数名:main
*函数的描述:通过中断实现按键的捕获
*输入参教:
*输出参数:
*返回值:
*图数作者:
*创建时间:
*更改说明:
*****************/
Tip2:如何使用CMSIS的延时
HAL_Delay()系统延时的步骤:
它的实现步骤如下:
1.用变量获得系统时钟源计数器的值
2.获得要延迟时间的参数值
3.比较两者大小,若时钟计数器的值大于要实现延迟的值,就会困在循环里;反之,跳出循环,延时完成。
/*** @brief此函数提供最小延迟(以毫秒为单位)对变量递增。* @note在默认实现中,SysTick计时器是基准时间的来源。*它用于在固定的时间间隔生成中断,其中uwTick是递增的。这个函数被声明为__weak,在其他情况下会被覆盖实现在用户文件。*@param Delay指定延迟时间长度,单位为毫秒。*@retval无*/
__weak void HAL_Delay(uint32_t Delay)
{uint32_t tickstart = HAL_GetTick(); //获得起始时钟uint32_t wait = Delay;/* Add a freq to guarantee minimum wait */if (wait < HAL_MAX_DELAY) //#define HAL_MAX_DELAY 0xFFFFFFFFU=1111 1111 1111 1111 1111 1111 1111 1111{// HAL_TICK_FREQ_1KHZ = 1U,// HAL_TICK_FREQ_DEFAULT = HAL_TICK_FREQ_1KHZwait += (uint32_t)(uwTickFreq); //作用是给wait加1。HAL_TickFreqTypeDef uwTickFreq = HAL_TICK_FREQ_DEFAULT; /* 1KHz */}while((HAL_GetTick() - tickstart) < wait) //当前时钟-起始时钟的值小于wait(delay)就重复操作,直到计时结束{}
}
GetTick函数原型
/**调用这个函数是为了增加一个全局变量“uwTick”用作申请时基。
在默认实现中,这个变量每1ms增加一次在SysTick ISR。
这个函数被声明为__weak,在其他情况下会被覆盖实现在用户文件。
* @retval无*/
__weak void HAL_IncTick(void)
{uwTick += uwTickFreq;
}/**
* @brief提供以毫秒为单位的tick值。
这个函数被声明为__weak,在其他情况下会被覆盖实现在用户文件。
@retval tick value*/
__weak uint32_t HAL_GetTick(void)
{return uwTick;
}
对于裸机程度,没有其他的隐蔽的东西,自己好好分析还是可以理清程序运行的细节及时序关系。遵守的原则:
1、尽量不要在主程序中使用死等的延时,二、每个子程序(也可以叫任务吧)的查询频率要大于主程序运行的时间。比如:ad采样,100ms采样一次,那么,主程序一定要在100ms以内执行完毕。
死等的延时可以是us级别的,时序性较高的地方,大的延时就使用定时器。
stm32f407_intr_handle.c解析
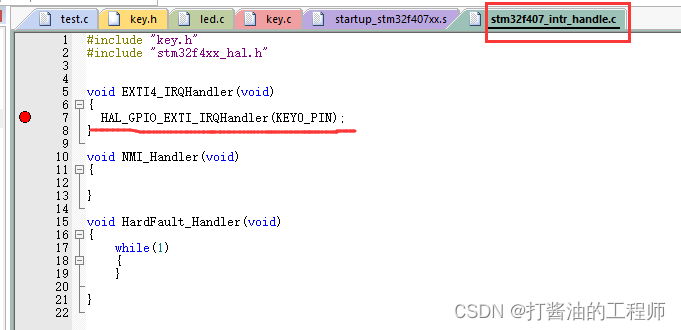
中断处理函数:void EXTI4_IRQHandler
根据startup_stm32f407xx.s中对于handler的描述,编写相应的断点处理函数:
__Vectors DCD __initial_sp ; Top of StackDCD Reset_Handler ; Reset HandlerDCD NMI_Handler ; NMI HandlerDCD HardFault_Handler ; Hard Fault HandlerDCD MemManage_Handler ; MPU Fault HandlerDCD BusFault_Handler ; Bus Fault HandlerDCD UsageFault_Handler ; Usage Fault HandlerDCD 0 ; ReservedDCD 0 ; ReservedDCD 0 ; ReservedDCD 0 ; ReservedDCD SVC_Handler ; SVCall HandlerDCD DebugMon_Handler ; Debug Monitor HandlerDCD 0 ; ReservedDCD PendSV_Handler ; PendSV HandlerDCD SysTick_Handler ; SysTick Handler
执行函数:HAL_GPIO_EXTI_IRQHandler(KEY0_PIN),调用stm32f4xx_hal_gpio.c中的void HAL_GPIO_EXTI_IRQHandler(uint16_t GPIO_Pin),函数的定义为:
void HAL_GPIO_EXTI_IRQHandler(uint16_t GPIO_Pin)
{/* EXTI line interrupt detected *///#define __HAL_GPIO_EXTI_GET_IT(__EXTI_LINE__) (EXTI->PR & (__EXTI_LINE__))//__EXTI_LINE__ specifies the EXTI line flag to check.if(__HAL_GPIO_EXTI_GET_IT(GPIO_Pin) != RESET) // RESET = 0U(stm32f4xx.h),表明检测到了中断{/*** @brief Clears the EXTI's line pending bits.* @param __EXTI_LINE__ specifies the EXTI lines to clear.* This parameter can be any combination of GPIO_PIN_x where x can be (0..15)* @retval None*/__HAL_GPIO_EXTI_CLEAR_IT(GPIO_Pin);HAL_GPIO_EXTI_Callback(GPIO_Pin);}
}
回调函数在HAL_GPIO_EXTI_Callback在HAL中未明确实现(弱声明),需要自己构造实现函数。
原型为:
/*** @brief EXTI line detection callbacks.* @param GPIO_Pin Specifies the pins connected EXTI line* @retval None*/
__weak void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{/* Prevent unused argument(s) compilation warning */UNUSED(GPIO_Pin);/* NOTE: This function Should not be modified, when the callback is needed,the HAL_GPIO_EXTI_Callback could be implemented in the user file*/
}
在key.c中对回调函数进行了重写:
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{if(GPIO_Pin == KEY0_PIN) // KEY0_PIN被按下{Led_Ctrl(LED0_PIN_ROW, LED0_PIN, LED_ON); //执行点灯操作}
}
本节中uint16_t Detect_key(uint16_t key_pin)未使用。
调试流程
在中断处理函数和uwTick自加操作函数处设立中断进行调试:
void EXTI4_IRQHandler(void)
{HAL_GPIO_EXTI_IRQHandler(KEY0_PIN);
}void SysTick_Handler(void)
{HAL_IncTick(); //uwTick自加操作 uwTick += uwTickFreq;}
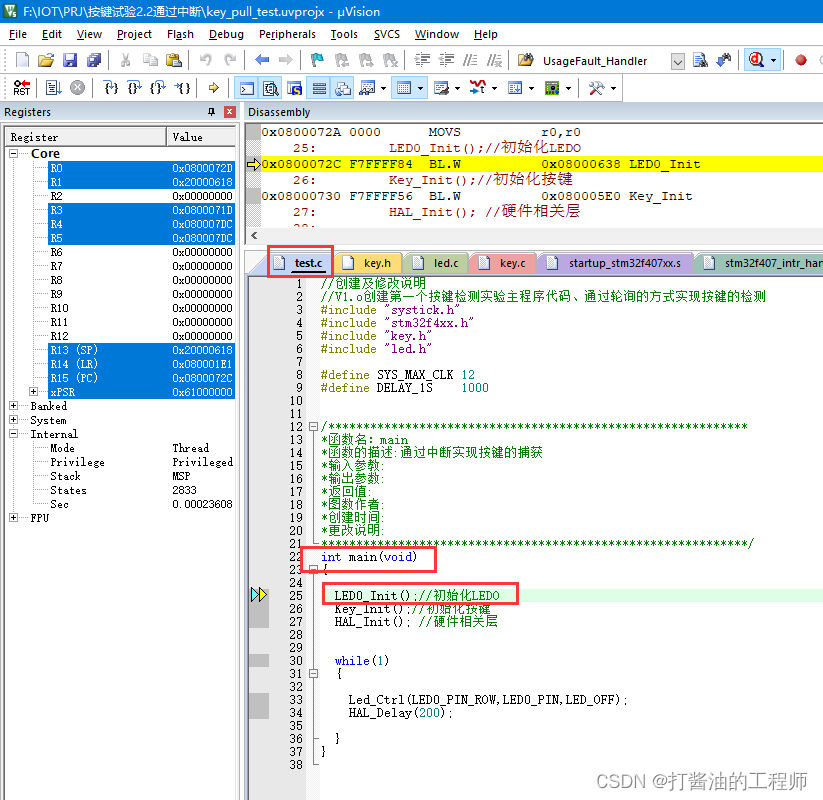
软件模拟调试
采用软件模拟方式,进入调试,停在了main函数底下的LED0_Init()函数:
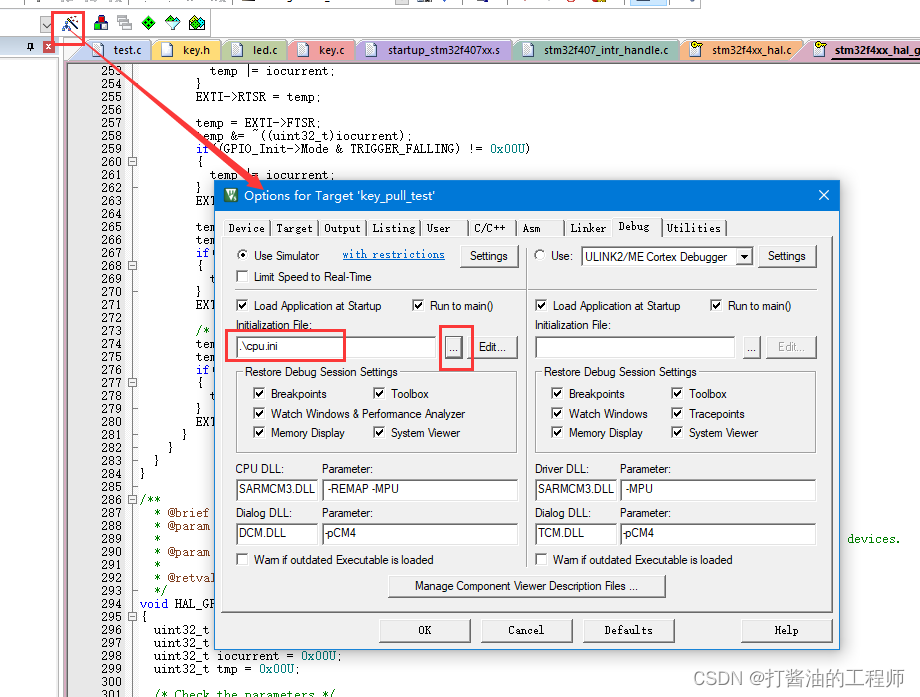
运行出现错误:*** error 65: access violation at 0x40023830 : no ‘write’ permission
由于没有指定相应的cpu:
解决方法:
- 1 新建cpu.ini,写入:
map 0x40000000,0x400FFFFF read write
- 2 将cpu.ini添加入debug:
两种代码的比较
中断模式对CPu占用率更小,等待时间更短,减小CPU占有率
课后作业:
1:预习缤程手册关于USART控制器的描述(第30章)
2:通过中断的方式实现一个程序,要求按下KEY1以后:让LED1间隔0.5S闪烁,并持续5S后关闭,实现代码并在板调试