徐州企业网站排名优化长沙工程招标公司
文章目录
- 前言
- 一、再谈构造函数
- 二、static成员
- 三、友元
- 四、内部类
- 五、匿名对象
- 六、再次理解类和对象
前言
👧个人主页:@小沈YO.
😚小编介绍:欢迎来到我的乱七八糟小星球🌝
📋专栏:C++ 心愿便利店
🔑本章内容:再谈构造函数、Static成员、友元、内部类、匿名对象、再次理解封装
记得 评论📝 +点赞👍 +收藏😽 +关注💞哦~
一、再谈构造函数
在创建对象时,编译器通过调用构造函数,给对象中各个成员变量一个合适的初始值。
class Date
{
public:
函数体类初始化
Date(int year, int month, int day){_year = year;_month = month;_day = day;}
private:
int _year;
int _month;
int _day;
};
虽然上述构造函数调用之后,对象中已经有了一个初始值,但是不能将其称为对对象中成员变量的初始化,构造函数体中的语句只能将其称为赋初值,而不能称作初始化。因为初始化只能初始化一次,而构造函数体内可以多次赋值
初始化列表:以一个冒号开始,接着是一个以逗号分隔的数据成员列表,每个"成员变量"后面跟一个放在括号中的初始值或表达式。
class Date
{
public:
//成员定义的地方
Date(int year, int month, int day: _year(year), _month(month), _day(day)
{}
private:
int _year;//成员声明的地方
int _month;
int _day;
};
- 引用成员变量
- const成员变量
- 自定义类型成员(且该类没有默认构造函数时)
🌟其中引用成员变量和const成员变量:必须在定义的时候初始化。初始化列表就是对象中成员变量定义的位置。
class A
{
public:A(int a=0)//既有默认构造又显示写了用显示写的:_a(a){}
private:int _a;
};
________________________________________________________________________________
class A
{
public:A(int a):_a(a){}
private:int _a;
};
class B
{
public:B(int a, int ref):_aobj(a),_ref(ref),_n(10){}
private:A _aobj; // 没有默认构造函数int& _ref; // 引用const int _n; // const
};
🌟除了上述几个特例外,其他的成员变量可以不出现在初始化列表中,此时编译器对内置类型不做处理(一般是随机值),对自定义类型会调用它的默认构造,内置类型如果给了默认值,则编译器会使用这个默认值。
class Time
{
public:Time(int hour = 0):_hour(hour){cout << "Time()" << endl;}
private:int _hour;
};class Date
{
public:Date(int day){}
private:int _day;Time _t;
};int main()
{Date d(1);
}
class A
{
public:A(int a):_a1(a),_a2(_a1){}void Print() {cout<<_a1<<" "<<_a2<<endl;}
private:int _a2;int _a1;
};
int main() {A aa(1);aa.Print();
}

🌟上述代码中,因为A类中成员变量的声明顺序是_a2、_a1,所以在初始化列表中先去初始化_a2,但是_a2是用_a1来初始化的(_a2(_a1)),_a1此时还没有被初始化,所以是随机值,然后再按声明的顺序去初始化_a1,而_a1是用a初始化(_a1(a)),a是1,所以最终打印出来的结果_a1是1,而_a2是随机值
class Stack
{
public:Stack(size_t capacity):_array ((DataType*)malloc(sizeof(DataType) * _capacity)), _capacity(capacity),_size(0){下述这些代码是在函数体中完成的,初始化列表是做不到的cout << "Stack()" << endl;if (NULL == _array){perror("malloc申请空间失败");return;}memset(_array, 0, sizeof(DataType) * capacity);//初始化,把空间内所有数据设置为0}
private:DataType* _array;size_t _size;size_t _capacity;
};
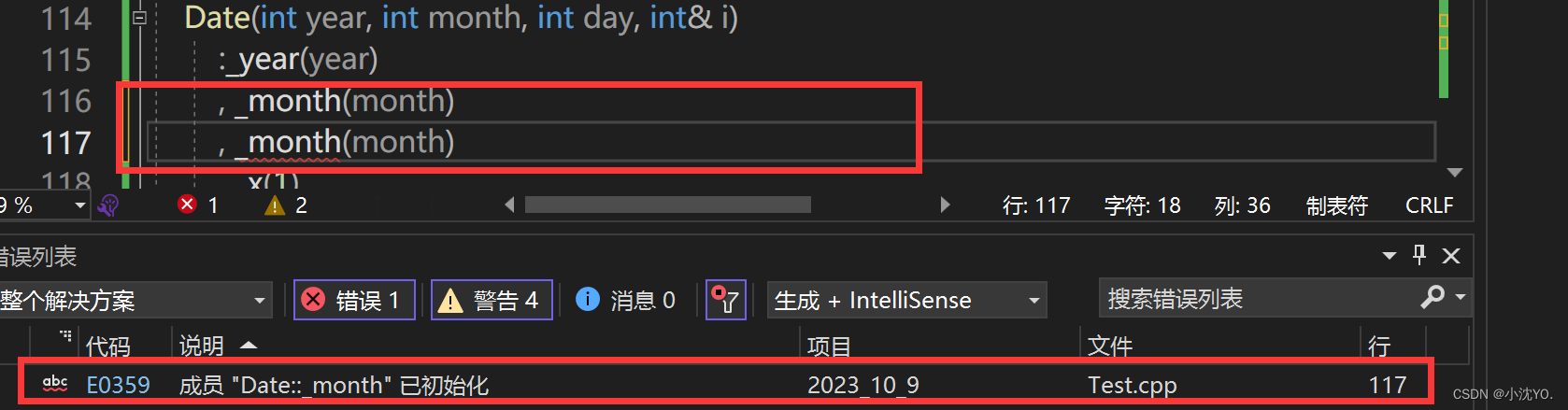
class Date
{
public:void Print(){cout << _year << "-" << _month << "-" << _day << endl;}Date(int year, int month, int day, int& i):_year(year), _month(month){_day = day;}
private:int _year;//每个成员声明int _month=1;int _day=2;
};
int main()
{int n = 0;Date d1(2023, 10, 1,n);//对象整体定义return 0;
}
🌟C++11支持在声明的位置给值,这个值是缺省值,声明的时候给缺省值。缺省值是给初始化列表的
如上述代码中的_day在初始化列表没有显示的给值,如果初始化列表没有显示给值就用此缺省值(2),若显示给值就不用这个缺省值(就像_month声明位置给了缺省值(1),初始化列表也给值了(10)就不用缺省值(1))

构造函数不仅可以构造与初始化对象,对于单个参数或者除第一个参数无默认值其余均有默认值的构造函数,还具有类型转换的作用
🌟**C++支持单参数构造函数的隐式类型转换,隐式类型转换中间要生成一个临时对象**
class A
{
public:A类是只有一个单参数的构造函数A(int i ):_a(i){cout << "A(int i )" << endl;}A(const A&aa):_a(aa._a ){cout << "A(const A&aa)" << endl;}private:int _a;
};
int main()
{A aa1(1);A aa2 = 2;return 0;
}
🌟解析:上述代码,对于A aa1(1)这样的初始化时没有问题 ,对于A aa2 = 2本质上就是隐式类型转换,把一个整型2转换成自定义类型A,用2去调用构造函数,得到一个A类型的临时对象,然后再用这个A类型的临时对象去调用拷贝构造创建aa2。对于比较新的编译器,对这种连续的调用构造、拷贝构造会进行优化为直接构造,会用2直接去调用构造函数完成aa2的创建

根据上述运行结果,可以看到只调用了构造函数(优化后),但是对于上述解析并不会令人信服觉得是先构造再拷贝构造,而单纯就是一个直接构造。下面对上面的解析来进行验证,证明是先构造再拷贝构造而不是直接构造
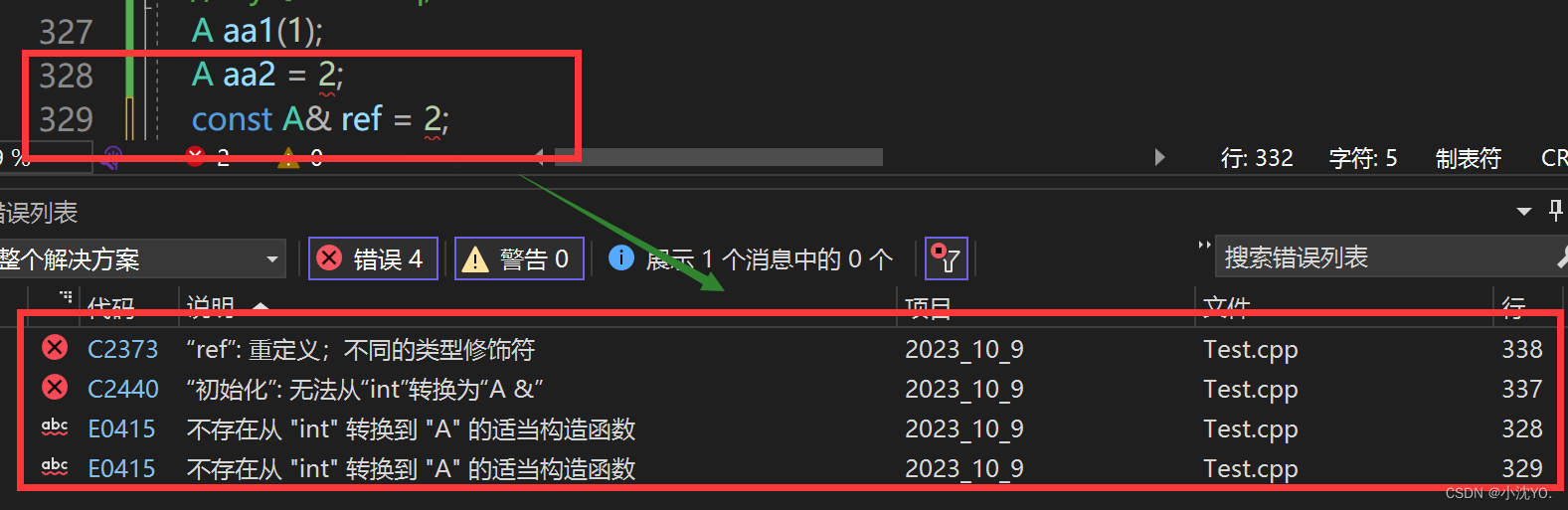
int main()
{A& ref = 2;const A& ref = 2;return 0;
}
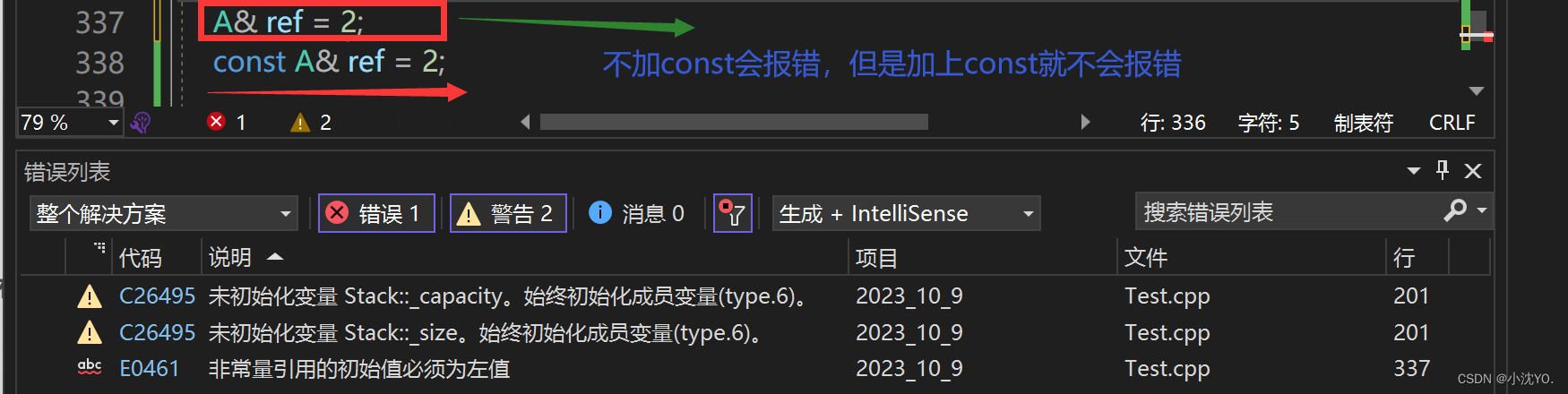
🌟为什么加上const不会报错,不加const就会报错呢?就是因为这里会首先用2去调用构造函数,创建一个A类型的临时对象,临时对象具有常性,这里的ref就是这个临时对象的别名,所以要在ref的前面加上const进行修饰才可以,不然就是权限的放大
🌟如果想要禁止隐式类型转换就可以在构造函数前面加上explicit关键字进行修饰
单参数
class A
{
public:explicit A(int i ):_a(i){cout << "A(int i )" << endl;}A(const A&aa):_a(aa._a ){cout << "A(const A&aa)" << endl;}
private:int _a;
};int main()
{A aa1(1);A aa2 = 2;const A& ref = 2;return 0;
}
———————————————————————————————————————————————————————————————————————————————————
多参数
class B
{
public:explicit B(int b1,int b2):_b1(b1),_b2(b2){cout << "B(int b1, int b2)" << endl;}
private:int _b1;int _b2;
};int main()
{B bb1 = 1, 2;多参数错误写法//C++11支持多参数的隐式类型转换多参数正确写法:B bb1(1, 1);//构造B bb2 = { 2,2 };//先构造再拷贝构造再优化const B& ref2 = { 3,3 };return 0;
}
二、static成员
示例一个场景,实现一个类,计算程序中创建出了多少个类对象和正在使用的还有多少个类对象。
第一时刻想到的解决方式一定是:创建两个全局变量初始化为0,一个代表创建的对象(构造和拷贝构造中++);另一个代表正在使用的对象(在构造和拷贝构造中++析构中- -)
//累计创建了多少个对象
int n = 0;
//正在使用的还有多少个对象
int m = 0;
class A
{
public:A() { ++n; ++m;}A(const A& t) { ++n;++m;}~A() { --m; }private:};
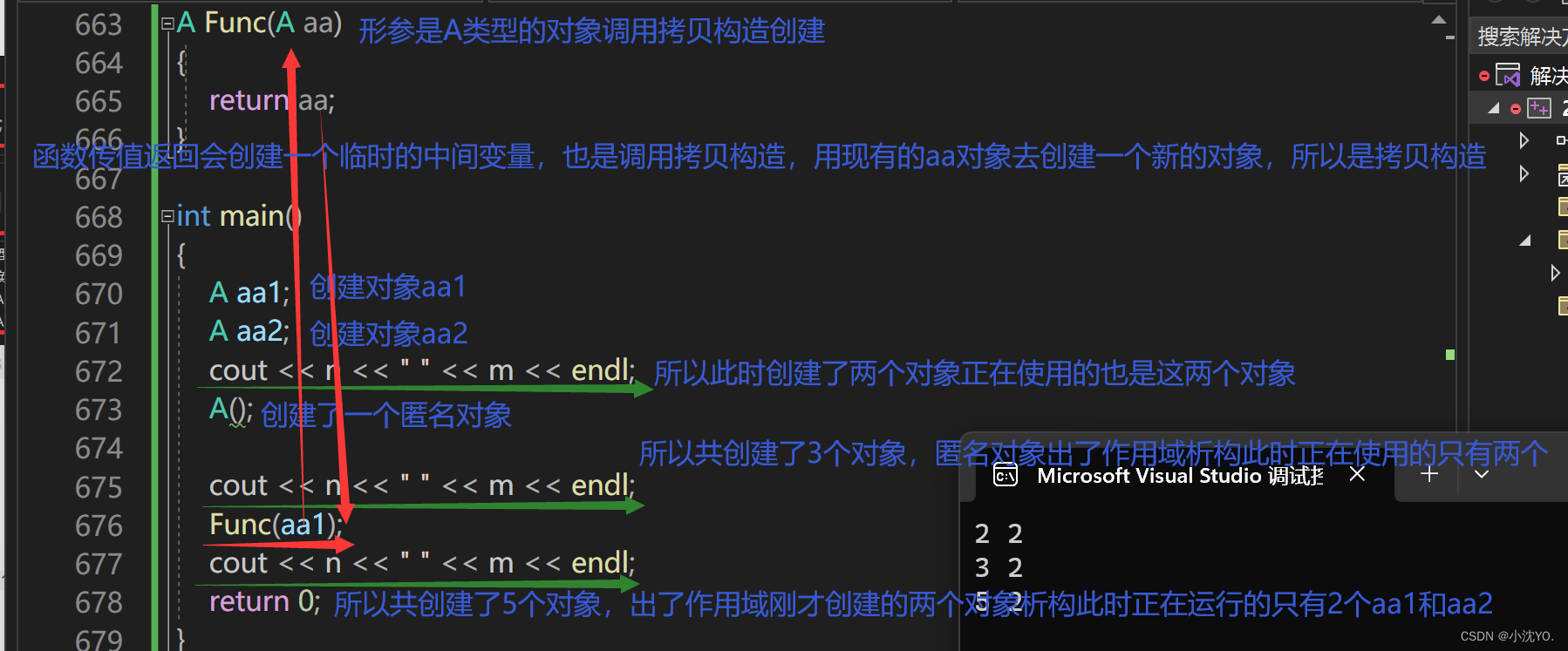
A Func(A aa)
{return aa;
}int main()
{A aa1;A aa2;cout << n << " " <<m << endl;A();cout << n << " " << m << endl;Func(aa1);cout << n << " " << m << endl;return 0;
}
但是定义全局变量就意味着我们可以在程序的任意地方修改最终会对所要实现的结果造成误差所以定义全局变量是一个不太完善的做法,此时就会想到把全局的n和m放进类里面,让它受访问限定符的限制
class A
{
public:A() { ++n; ++m;}A(const A& t) { ++n;++m;}~A() { --m; }private:
//下述这种单纯放进类里面是错误的int n=0;int m=0;
//要加上staticstatic int n = 0;static int n = 0;
//正确写法:static int n;static int n;
};
如上,把n和m单纯的放进类里面是不行的,因为这就使得每个对象都有一个n和m,但是我们是不希望它属于每个对象而是希望它属于整个类(所有对象),所以要加上static,这样就使得它属于所有对象而不是某一个对象

🌟上述报错的原因就是:在声明处给值相当于缺省值,而缺省值是给初始化列表用的,但是静态成员变量不会走初始化列表,因为初始化列表是某个对象的成员的初始化而n和m不是属于某一个对象而是所有对象
🌟怎么证明一下n和m是属于所有对象而不是某一个对象:
对于这个A类当计算A类的大小时,sizeof(A)结果是1,是因为这个A类相当于一个空类,即便里面有n和m这两个成员,但是这两个成员不存在对象里面,它们不属于某一个对象而是所有对象,它们存在静态区

声明为static的类成员称为类的静态成员,用static修饰的成员变量,称之为静态成员变量;用static修饰的成员函数,称之为静态成员函数。静态成员变量一定要在类外进行初始化
- 静态成员为所有类对象所共享,不属于某个具体的对象,存放在静态区
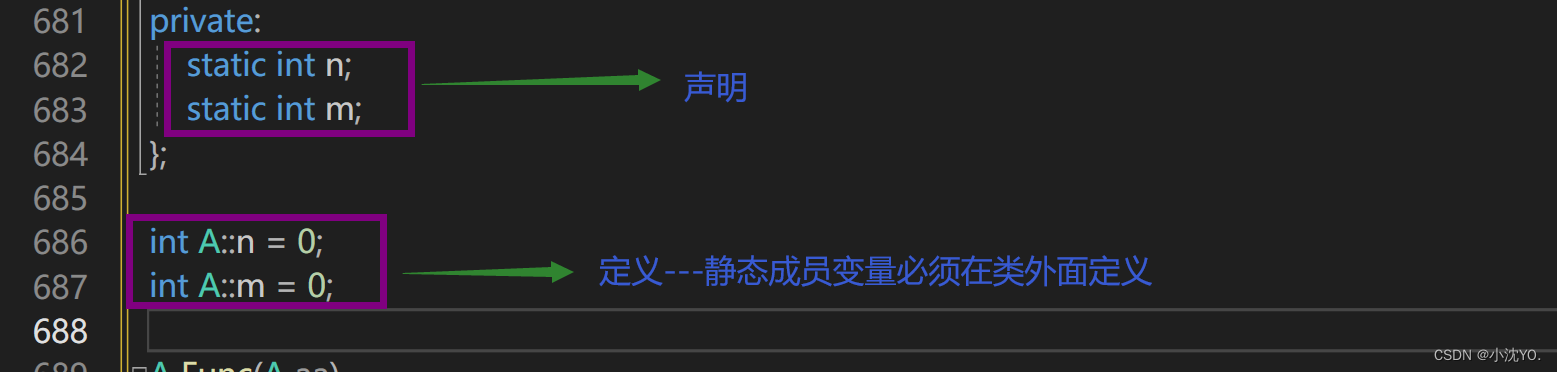
- 静态成员变量必须在类外定义,定义时不添加static关键字,类中只是声明
class A
{
public:A(){++n;++m;}A(const A& t){++n;++m;}~A(){--m;}
private:static int n;static int m;
};int A::n = 0;
int A::m = 0;
- 类静态成员即可用 类名::静态成员 或者 对象.静态成员 来访问
int main()
{A();A::Print();定义为静态成员函数没有this指针只需要突破类域即可,所以这种访问并不会报错但是非静态成员函数这样访问就会报错A aa1;Func(aa1);aa1.Print(); 用对象调用是因为要去类域找同时传递参数给this指针return 0;
}
- 静态成员函数没有隐藏的this指针,不能访问任何非静态成员
- 静态成员也是类的成员,受public、protected、private 访问限定符的限制
三、友元
友元提供了一种突破封装的方式,有时提供了便利。但是友元会增加耦合度,破坏了封装,所以友元不宜多用。
友元分为:友元函数和友元类
🌟问题:现在尝试去重载operator<<,然后发现没办法将operator<<重载成成员函数。因为cout的输出流对象和隐含的this指针在抢占第一个参数的位置。this指针默认是第一个参数也就是左操作数了。但是实际使用中cout需要是第一个形参对象,才能正常使用。所以要将operator<<重载成全局函数。但又会导致类外没办法访问成员,此时就需要友元来解决。operator>>同理
class Date
{
public:
Date(int year, int month, int day): _year(year), _month(month), _day(day){}// d1 << cout; -> d1.operator<<(&d1, cout); 不符合常规调用
// 因为成员函数第一个参数一定是隐藏的this,所以d1必须放在<<的左侧
ostream& operator<<(ostream& _cout){_cout << _year << "-" << _month << "-" << _day << endl;return _cout;}
private:
int _year;
int _month;
int _day;
};
友元函数可以直接访问类的私有成员,它是定义在类外部的普通函数,不属于任何类,但需要在类的内部声明,声明时需要加friend关键字
class Date
{friend ostream& operator<<(ostream& _cout, const Date& d);friend istream& operator>>(istream& _cin, Date& d);
public:Date(int year = 1900, int month = 1, int day = 1): _year(year), _month(month), _day(day){}
private:int _year;int _month;int _day;
};
ostream& operator<<(ostream& _cout, const Date& d)
{_cout << d._year << "-" << d._month << "-" << d._day;return _cout;
}
istream& operator>>(istream& _cin, Date& d)
{_cin >> d._year;_cin >> d._month;_cin >> d._day;return _cin;
}
int main()
{Date d;cin >> d;cout << d << endl;return 0;
}
说明:
- 友元函数可访问类的私有和保护成员,但不是类的成员函数
- 友元函数不能用const修饰
- 友元函数可以在类定义的任何地方声明,不受类访问限定符限制
- 一个函数可以是多个类的友元函数
- 友元函数的调用与普通函数的调用原理相同
友元类的所有成员函数都可以是另一个类的友元函数,都可以访问另一个类中的非公有成员。
- 友元关系是单向的,不具有交换性
比如上述Time类和Date类,在Time类中声明Date类为其友元类,那么可以在Date类中直接访问Time类的私有成员变量,但想在Time类中访问Date类中私有的成员变量则不行。
class Time
{friend class Date; // 声明日期类为时间类的友元类,则在日期类中就直接访问Time类中的私有成员变量
public:Time(int hour = 0, int minute = 0, int second = 0): _hour(hour), _minute(minute), _second(second){}private:int _hour;int _minute;int _second;
};
class Date
{
public:Date(int year = 1900, int month = 1, int day = 1): _year(year), _month(month), _day(day){}void SetTimeOfDate(int hour, int minute, int second){// 直接访问时间类私有的成员变量_t._hour = hour;_t._minute = minute;_t._second = second;}private:int _year;int _month;int _day;Time _t;
};
- 友元关系不能传递
如果C是B的友元, B是A的友元,则不能说明C时A的友元。 - 友元关系不能继承。
四、内部类
🌟概念:如果一个类定义在另一个类的内部,这个内部类就叫做内部类。内部类是一个独立的类,它不属于外部类,更不能通过外部类的对象去访问内部类的成员。外部类对内部类没有任何优越的访问权限。
🌟注意:内部类就是外部类的友元类,参见友元类的定义,内部类可以通过外部类的对象参数来访问外部类中的所有成员。但是外部类不是内部类的友元。
特性:
- 内部类可以定义在外部类的public、protected、private都是可以的。
- 注意内部类可以直接访问外部类中的static成员,不需要外部类的对象/类名。
class A
{
public:class B {public:void FuncB(){A aa1;//cout << "访问A类中的非静态成员_a:" << _a << endl; 访问报错cout << "访问A类中的静态成员_b:" << _b << endl;//cout << "通过域作用限定符访问A中的非静态成员_a:" << A::_a << endl; 访问报错cout << "通过域作用限定符访问A中的静态成员_b:" << A::_b << endl;cout << "通过A类对象访问A中的非静态成员_a:" << aa1._a << endl;cout << "通过A类对象访问A中的静态成员_b:" << aa1._b << endl;}private:int _bb;};
private:int _a=1;static int _b;
};int A:: _b = 10;int main()
{A aa;A::B bb1;bb1.FuncB();cout << sizeof(A) << endl;return 0;
}

- sizeof(外部类)=外部类,和内部类没有任何关系。
class D
{
public:private:int _d;
};class C
{
public:class E{private:int _e;};
private:int _c;D _d;
};
___________________________________________________________________________________
class A
{
public:class B {private:int _b;};
private:int _a;
};int main()
{cout << sizeof(A) << endl;cout << sizeof(C) << endl;return 0;
}

由上述代码运行结果可以看到sizeof(外部类)=外部类,和内部类没有任何关系。就像A类打印出来是4而非8,但是对于C类运行结果才是8
五、匿名对象
- 匿名对象和临时对象一样具有常性
- const引用可以延长匿名对象的生命周期,生命周期在当前函数局部域
class A
{
public:A(int a = 0):_a(a){cout << "A(int a)" << endl;}A(const A& aa):_a(aa._a){cout << "A(const A& aa)" << endl;}~A(){cout << "~A()" << endl;}
private:int _a;
};
int main()
{A();const A& ref = A();A aa2;return 0;
}

- 无参匿名对象也要带括号
- 它的生命周期只有这一行,下一行它就会自动调用析构函数
class A
{
public:A(int i):_a(i){cout << "A(int i )" << endl;}A(const A& aa):_a(aa._a){cout << "A(const A&aa)" << endl;}~A(){cout << "~A()" << endl;}
private:int _a;
};
int main()
{//有名对象:生命周期在当前局部域A aa5(5);//匿名对象:生命周期只在这一行A(7);A aa6(6);return 0;
}
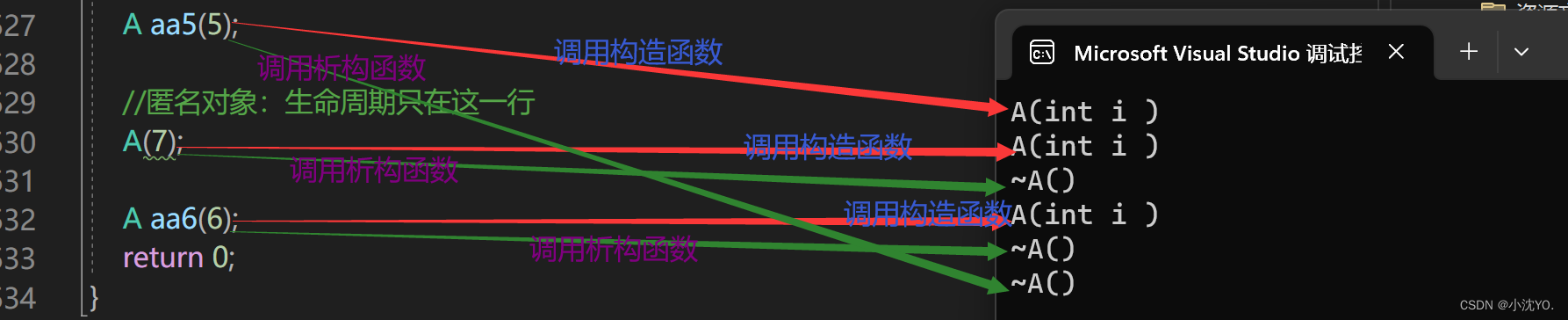
由上述代码运行结果可以明显看到,当匿名对象调用构造函数后下一步就析构了,证明它的生命周期只在它所在的一行
🌟在Solution类中定义了一个函数Sum_Solution,如果想要调用这个函数就必须通过对象才能去调用,所以首先要创建一个Solution类型的对象s1,再去用这个对象s1调用类里面的函数Sum_Solution,但是对于匿名对象,就不需要上述两行的步骤可以简化,可以在创建匿名对象,通过这个匿名对象去调用类里面的函数。
class Solution {
public:int Sum_Solution(int n) {//...return n;}
};
int main()
{Solution s1;s1.Sum_Solution(10);Solution().Sum_Solution(10);return 0;
}
六、再次理解类和对象
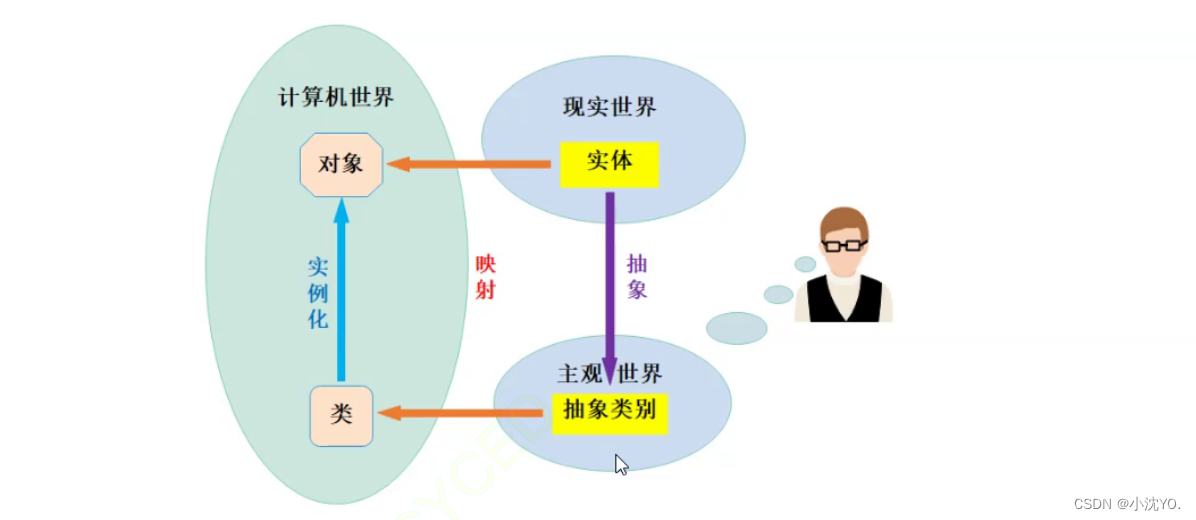
现实生活中的实体计算机并不认识,计算机只认识二进制格式的数据。如果想要让计算机认识现实生活中的实体,用户必须通过某种面向对象的语言,对实体进行描述,然后通过编写程序,创建对象后计算机才可以认识。比如想要让计算机认识洗衣机,就需要:
- 用户先要对现实中洗衣机实体进行抽象—即在人为思想层面对洗衣机进行认识,洗衣机有什么属性,有那些功能,即对洗衣机进行抽象认知的一个过程
- 经过1之后,在人的头脑中已经对洗衣机有了一个清醒的认识,只不过此时计算机还不清楚,想要让计算机识别人想象中的洗衣机,就需要人通过某种面相对象的语言(比如:C++、Java、Python等)将洗衣机用类来进行描述,并输入到计算机中
- 经过2之后,在计算机中就有了一个洗衣机类,但是洗衣机类只是站在计算机的角度对洗衣机对象进行描述的,通过洗衣机类,可以实例化出一个个具体的洗衣机对象,此时计算机才能洗衣机是什么东西。
- 用户就可以借助计算机中洗衣机对象,来模拟现实中的洗衣机实体了。
在类和对象阶段,大家一定要体会到,类是对某一类实体(对象)来进行描述的,描述该对象具有那些属性,那些方法,描述完成后就形成了一种新的自定义类型,才用该自定义类型就可以实例化具体的对象。