网站建设服务器费用北京网站建设推广服
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
📚2 运行结果
🎉3 参考文献
🌈4 Simulink实现

💥1 概述
在MATLAB Simulink中的自动电压调节器(AVR)模型。该自动电压调节器模型是Matlab/Simulink软件中设计的。也被称为无功功率控制的终端电压控制。
自动电压调节器(AVR)是一种用于终端电压控制的设备,主要用于无功功率控制。在这个研究中,我们使用MATLAB Simulink软件来建立AVR模型。
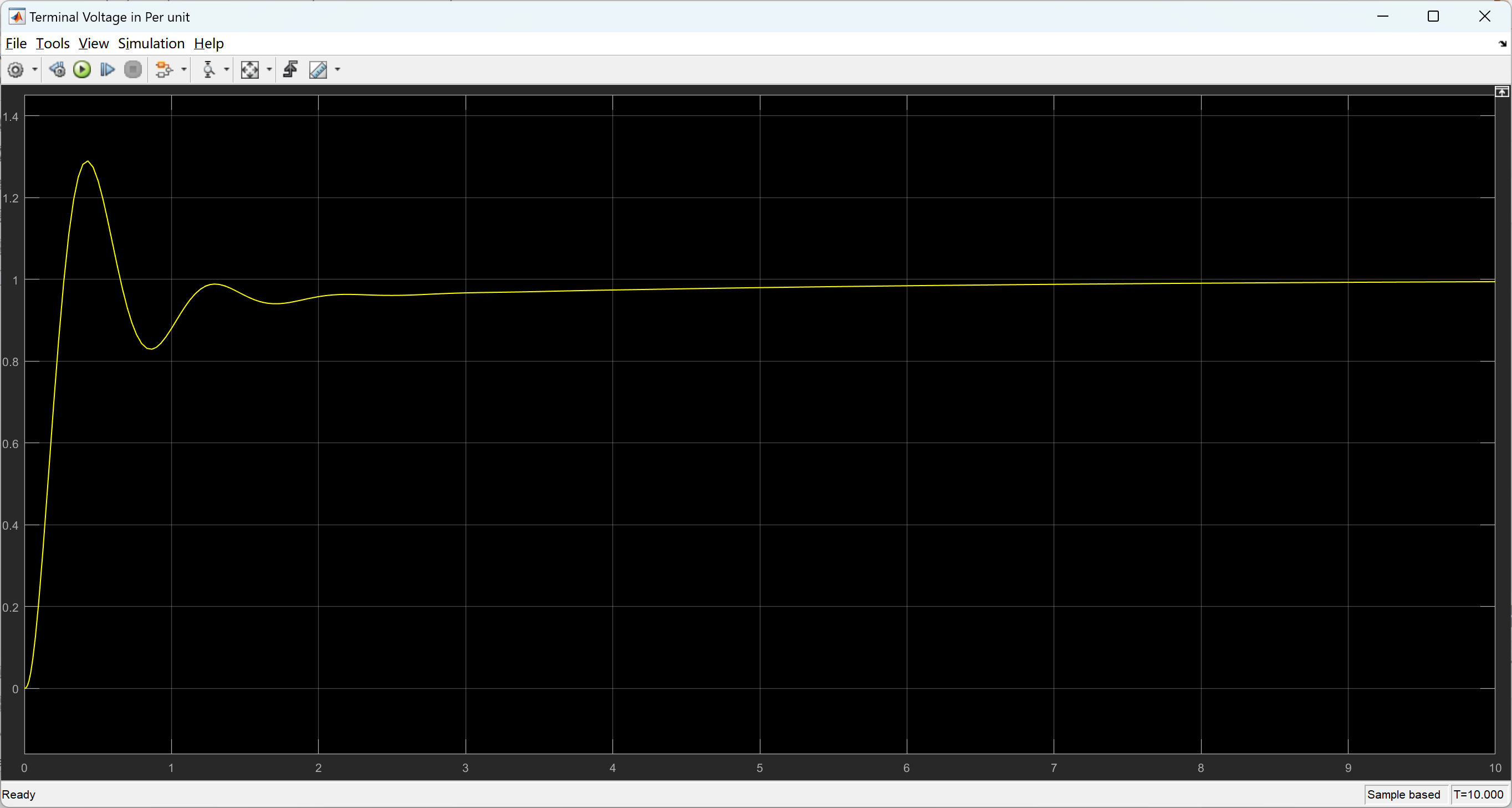
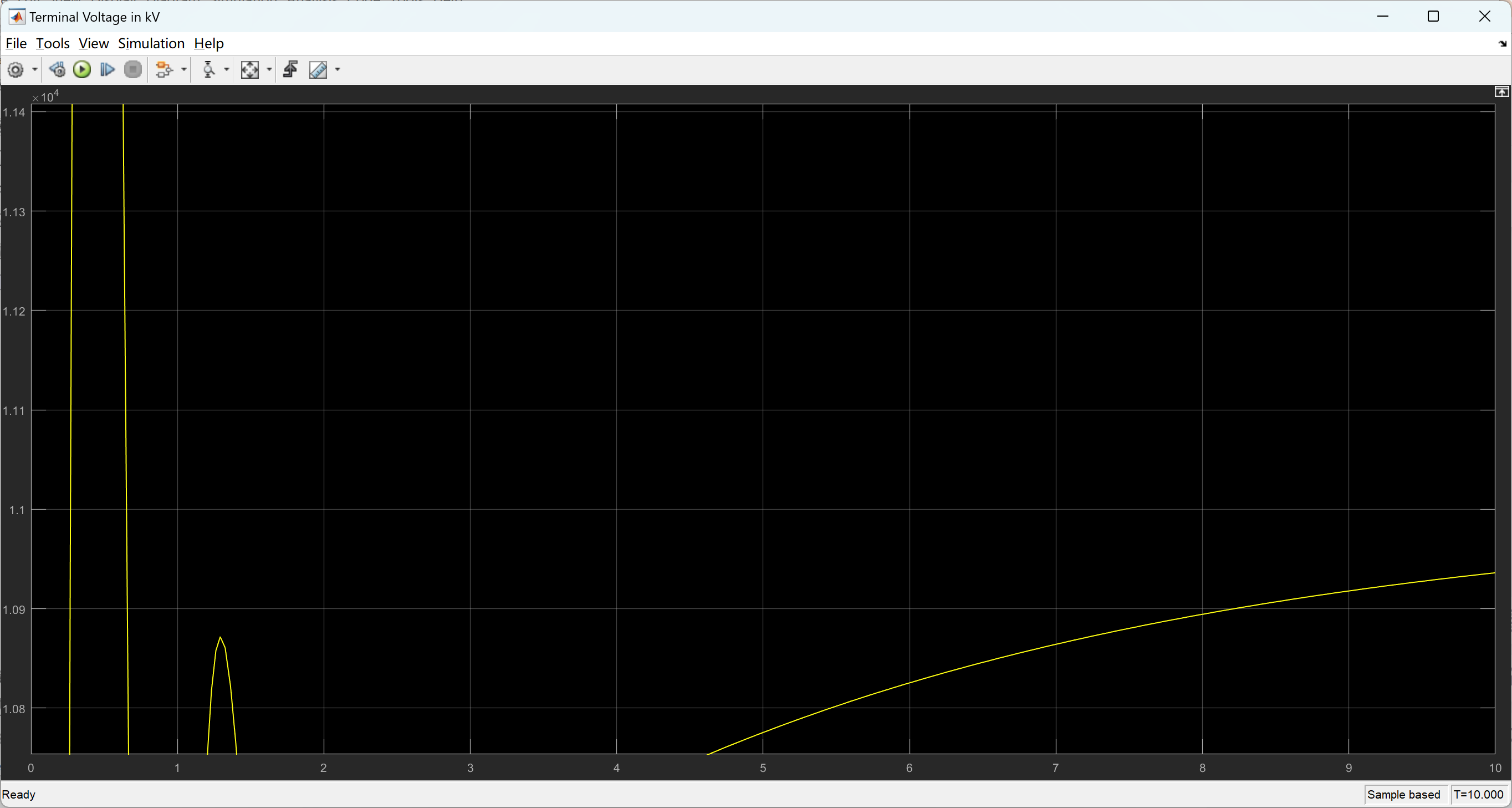
在这个研究中,我们首先讨论了如何以百分比和伏特为单位来测量终端电压。这是非常重要的,因为终端电压是AVR控制的关键参数。
然后,我们使用MATLAB Simulink建立了AVR模型。该模型包括输入电压、输出电压和控制信号等关键组件。
最后,我们讨论了如何将这个AVR模型应用于学士学位最后一年的项目,或者用于完成硕士和博士学位中的一个或两个研究目标。AVR模型可以用于研究电力系统的稳定性、无功功率控制等相关问题。
📚2 运行结果

🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]方姝.(AVC)自动电压控制及无功优化系统改造[J].城市建设理论研究:电子版, 2013, 000(019):1-3.
[2]刘国胜.自动电压控制(AVC)系统在衡水电网应用的研究[D].华北电力大学,2015.DOI:10.7666/d.Y2879571.
[3]周宇华.火电厂厂级自动电压控制(AVC)系统的研究[D].华北电力大学(保定);华北电力大学[2023-08-11].