phpcmsv9 网站搬家京伦科技网站做的怎么样
功能模型接口FMI(Functional Mock-up Interface)是一个开放且与工具解耦的标准。FMI包含了一个C-API(接口),一个用于描述接口的XML文件以及可交换的功能模型单元FMU(Functional Mock-up Unit),通常会是“zip”文件。FMI实际上是提供了容器化形式的模型,能够在不同的目标上轻松进行重复使用和部署,实现在不同的自动驾驶仿真工具之间动态交换仿真模型和联合仿真。
目录
一、FMI的使用
1、导入和导出工具
2、FMU文件结构
3、FMI 2.0和FMI 3.0
二、FMI 3.0.1中的联合仿真
1、多个仿真程序耦合
2、子系统耦合
3、示例
4、同步和误差管理
作者介绍
崔工
一、FMI的使用
1、导入和导出工具
通常来说在使用FMI时会有包含导入和导出工具。
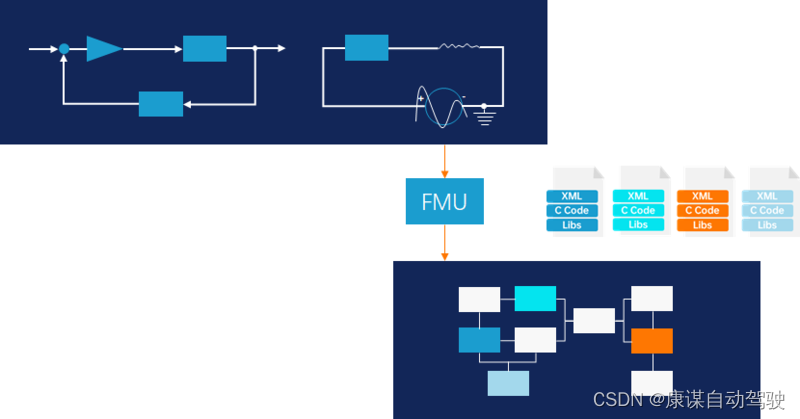
导出工具通常是开发模型的地方,能够将模型按照FMI标准打包为FMU;导入工具通常独立于导出工具,可以在外部设置由C-API定义的一个变量、一个值或是触发一个计算步骤,在接收FMU后在,可以在导入工具中与其他模型结合并实现联合仿真。
实际上FMI标准只定义了一个FMU的接口,在多个FMU进行耦合并实现联合仿真时,FMI标准并不涉及到的联合仿真算法或是FMU 的求解器。
2、FMU文件结构
FMU作为模型的容器能够自由的进行分发,通常来说是一个以".fmu"结尾的zip文件。
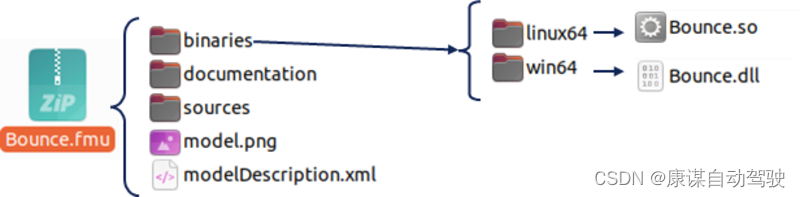

在一个FMU文件中,至少包含了一个模型描述文件,其描述了模型变量、接口、能力以及模型架构扩展限制的元数据信息。
还至少包含了一个二进制的模型表示,在Linux系统下是.so文件,在window系统中是dll文件。也可以是C源码,能够让使用者进行重新编译创建一个新的二进制文件用于新的目标,这一部署机制可以方便的扩展到不同的系统平台上。
除此以外,可能还包括额外的文件,比如模型文档和相关的头文件。
3、FMI 2.0和FMI 3.0
FMI2.0包括:
带有事件的常微分方程(ODEs),这些方程描述了系统的动态行为,需要通过数值求解器来进行求解;
连续和离散变量,即FMI的模型中,变量可能是随时间变化,也可以是在特定时间点发生变化;
时间概念,或可以理解为更广泛的独立变量,或是自变量,比如可以是一个角度,从而表述系统的动态变化。
FMI3.0增加:
不仅限于动态方程,也支持纯代数方程,可以处理不随时间变化的静态关系;
进一步支持了复杂的离散行为,即通过使用始终和模型分区来管理模型的顺序和同步;
同时不仅仅是基于物理的方程还可以:
-
vECU模型
-
机器学习模型
-
AI模型
-
......
二、FMI 3.0.1中的联合仿真

1、多个仿真程序耦合
联合仿真时将多个仿真程序耦合在一起,最终实现由多个子系统组成整理自动驾驶HiL系统的行为。
2、子系统耦合
子系统之间是互相耦合的,也就是每个子系统的行为依赖于其他子系统的行为,所以联合仿真必须是以逐步计算的方式进行。
3、示例
每个仿真程序负责计算一个子系统的行为,比如在自动驾驶HiL系统中,aiSim负责场景和传感器仿真,CarSim负责车辆动力学,两个仿真程序互相使用对方产生的输出来进行计算。
CarSim中车辆动力学更新的频率时1kHz,那么需要同步aiSim中场景更新的频率也为1kHz,而且只有在收到动力学信息后才会进行下一步的仿真。
4、同步和误差管理
在联合仿真的过程中,可能会产生附加误差,需要通过合适的联合仿真算法或是通信模式来将其限制在可接受的范围内,比如设置更新步长等。
作者介绍
崔工
康谋科技仿真测试业务技术主管,拥有超过5年的汽车仿真测试及自动驾驶技术研发经验,熟练掌握仿真测试工具和平台,如aiSim、HEEX等,能有效评估和优化自动驾驶系统的性能和安全性。拥有出色的跨文化沟通能力,成功带领团队完成多项海外技术合作项目,加速了公司在自动驾驶技术上的国际化进程。作为技术团队的核心,领导并实施过大规模的自动驾驶仿真测试项目,对于车辆行为建模、环境模拟以及故障诊断具有独到见解。擅长运用大数据分析和人工智能技术,优化仿真测试流程,提高测试效率和结果的准确性。
如您对上述产品和解决方案感兴趣,
欢迎联系康谋自动驾驶团队了解更多信息。
我们将竭诚为您服务!
期待与您的交流!
康谋科技 - 您的一站式自动驾驶解决方案合作伙伴,助力自动驾驶商业化落地 - keymotek康谋科技有限公司是原虹科自动驾驶业务孵化出来的全新独立公司,专注于自动驾驶领域。我们以数据为驱动力,提供高性能的数据采集、记录、传输方案,针对各种驾驶场景进行精准的仿真模拟,以及对大量自动驾驶数据进行高效、高质量处理。我们的一站式服务能够满足自动驾驶领域研发测试的全流程需求,助力客户在自动驾驶领域取得更大突破。![]() https://keymotek.com/
https://keymotek.com/