高端 网站开发门户网站模板源码
ARM 处理器的运行模式
ARM处理器共有7种运行模式,如下表所示:
处理器模式 | 描述 |
用户模式(User) | 正常程序运行模式 |
中断模式(IRQ) | 用于通常的中断处理 |
快速中断模式(FIQ) | 用于高速传输和通道处理 |
特权模式(Supervisor) | 供操作系统使用的一种保护模式 |
数据访问中止模式(Abort) | 用于虚拟存储及存储保护 |
未定义指令中止模式(Undefined) | 用于支持通过软件仿真硬件的协处理器 |
系统模式(System) | 用于运行特权级的操作系统任务 |
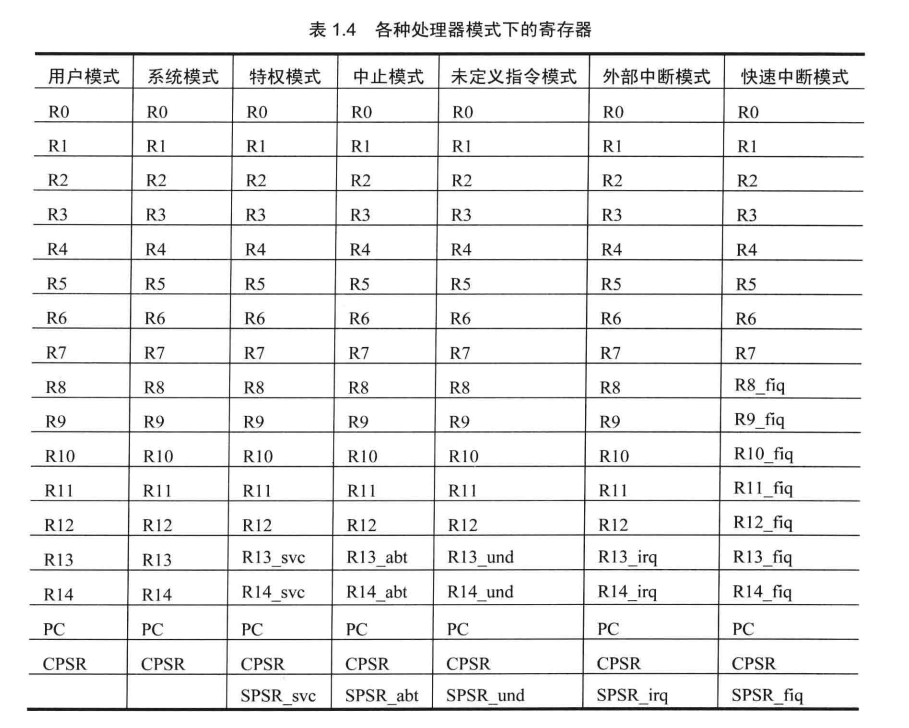
ARM寄存器介绍
ARM 共有37个寄存器。其中包括:
31个通用寄存器,包括程序计数器(PC)在内。这些寄存器都是32位的;
6个状态寄存器,这些寄存器都是32位寄存器,但目前只使用了12位;