做公司网站宣传公司大流量网站开发
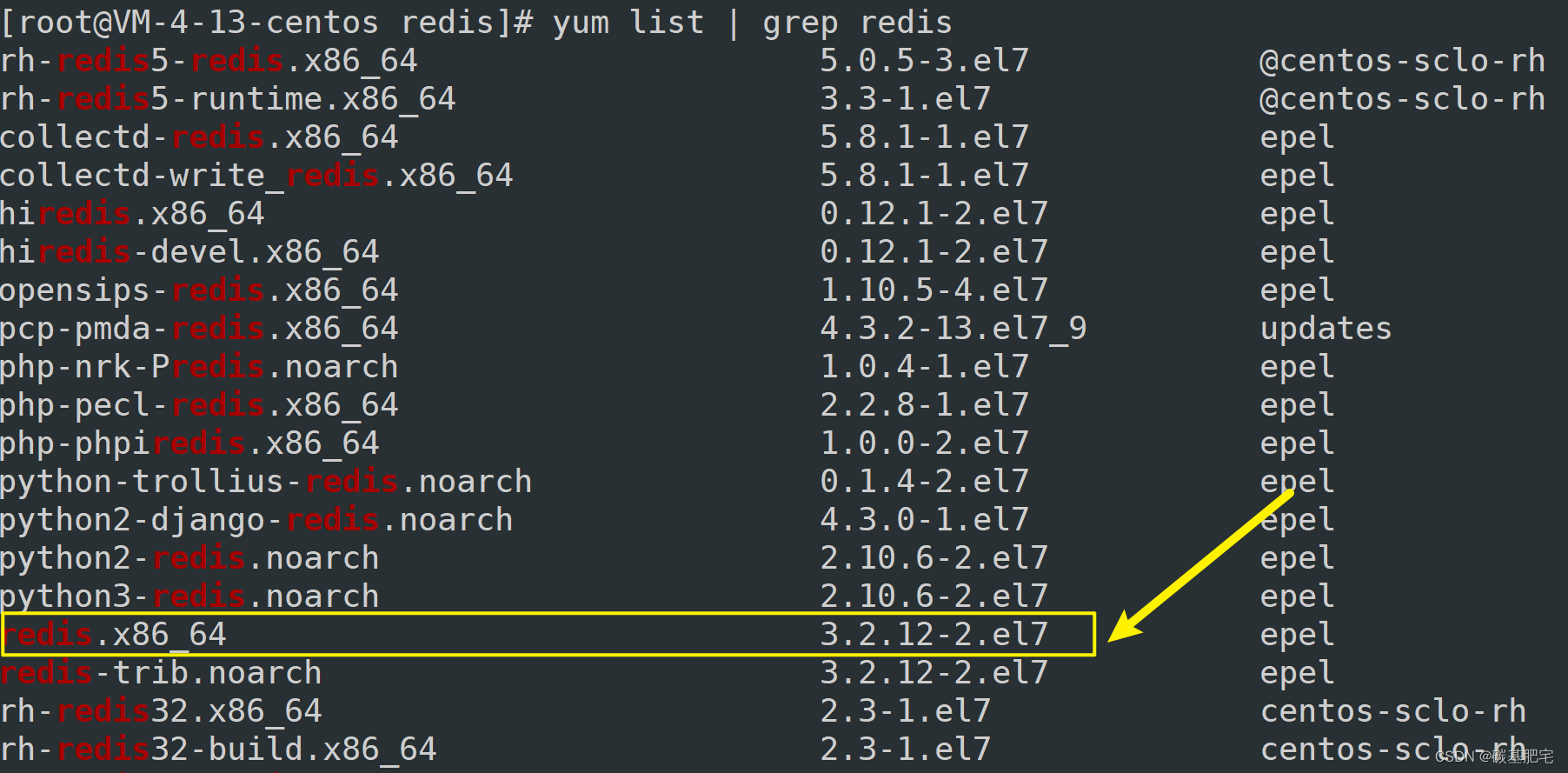
在Centos上安装Redis 5,如果是 Centos8,那么 yum 仓库中默认的 redis 版本就是 5,直接 yum install 即可。但如果是 Centos7,yum 仓库中默认的 redis 版本是 3 系列,比较老:
Redis 5 是一个比较新也比较稳定的版本,在实际应用中比较常见。本文介绍如何在 Centos7 上安装和配置 Redis 5,使用的工具是 xshell 用于连接远端服务器。
目录
1、安装额外的软件源 scl源
2、通过scl源下载安装redis
3、创建符号链接
3.1 针对可执行程序设置符号链接
3.2 针对配置文件设置符号链接
4、修改配置文件
4.1 设置 ip 地址
4.2 关闭保护模式
4.3 启动守护进程(后台进程)
4.4 设置工作目录
4.5 设置日志目录
5、启动 redis
6、停止 redis 服务
***温馨提示:
Xshell 下的复制粘贴
复制: ctrl + insert(有些同学的 insert 需要配合 fn 来按)
粘贴: shift + insert
ctrl + c/ctrl +v 是不行的
xshell 成功连接后:
1、安装额外的软件源 scl源
yum install centos-release-scl-rh
此处因为我已经安装过scl源了,所以提示 Nothing to do。但如果没有安装过,则会进入安装程序。遇到 Is this ok [y/d/N] 的通通选 y。
2、通过scl源下载安装redis
yum install rh-redis5-redis和上面一样,如果没有安装过则进入redis的下载安装程序,遇到 Is this ok [y/d/N] 的通通选 y。
3、创建符号链接
默认安装的目录为 /opt/rh/rh-redis5/root/usr/bin/ ,藏的太深不方便使用。我们通过符号链接把需要用到的关键内容设置到方便使用的目录中。(可以把符号链接理解为“快捷方式”)
在 Linux 中可以通过 ln -s 命令创建符号链接。
3.1 针对可执行程序设置符号链接
先切换路径:
cd /usr/bin
然后分别针对redis服务器、redis哨兵和redis客户端这三个可执行程序设置符号链接:
ln -s /opt/rh/rh-redis5/root/usr/bin/redis-server ./redis-server
ln -s /opt/rh/rh-redis5/root/usr/bin/redis-sentinel ./redis-sentinel
ln -s /opt/rh/rh-redis5/root/usr/bin/redis-cli ./redis-cli设置完毕后可以通过命令 ll redis-* 来查看当前目录下的redis可执行文件:

3.2 针对配置文件设置符号链接
先切换路径,/etc/目录通常是Linux上存放配置文件的目录:
cd /etc/然后运行下面这条命令:
ln -s /etc/opt/rh/rh-redis5/ ./redis运行完后,可以通过 ll redis/ 命令来查看当前目录下的redis配置文件:

4、修改配置文件
直接在命令行中用 vim 命令修改配置文件太麻烦也容易出错,这里可以借助 xshell 中的工具 xftp 把文件传输到本地计算机,在本地修改后再传入远端服务器。
先切换目录:
cd redis/然后打开 xftp 工具:

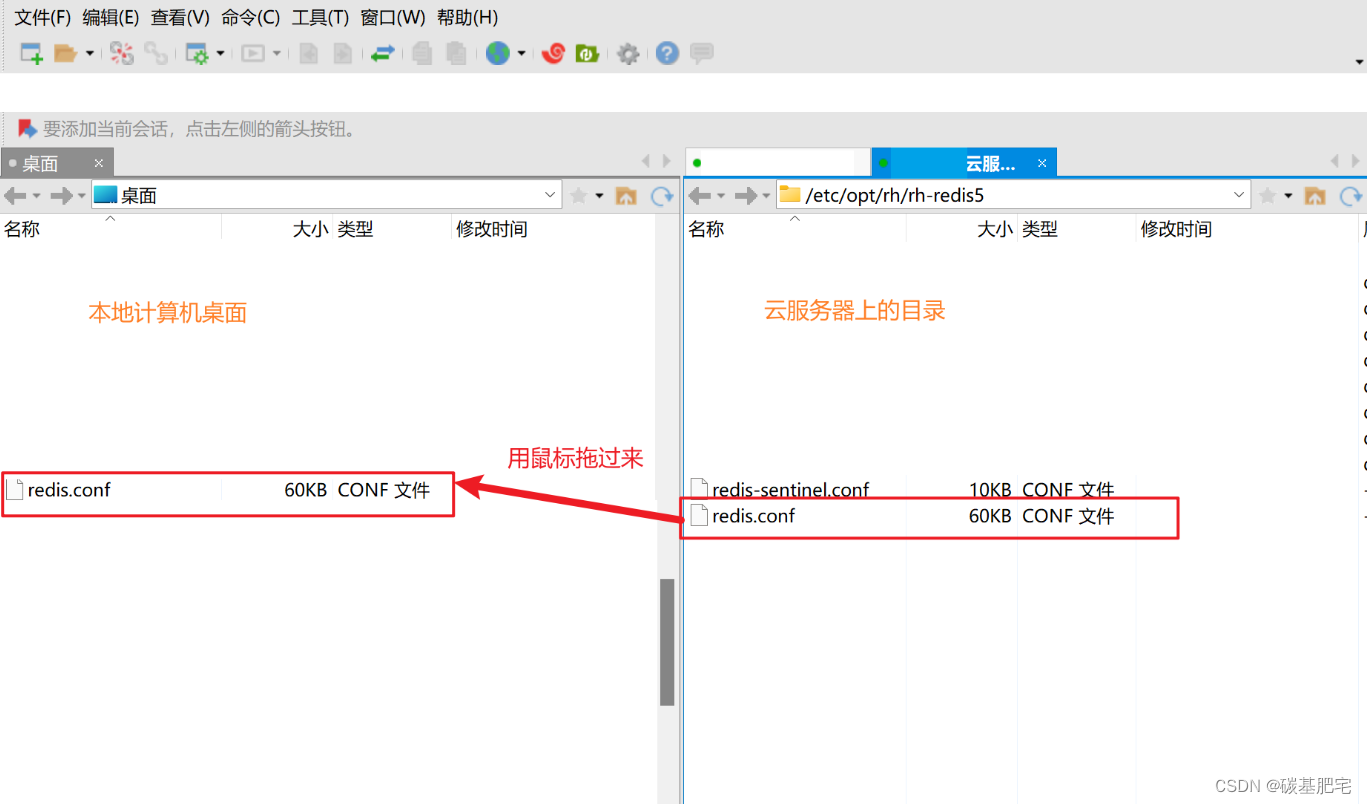 将redis.conf文件从云服务器拖到本地计算机,然后就能在自己电脑的桌面看到它。用记事本等文本编辑器打开redis.conf,进入如下更改:
将redis.conf文件从云服务器拖到本地计算机,然后就能在自己电脑的桌面看到它。用记事本等文本编辑器打开redis.conf,进入如下更改:
4.1 设置 ip 地址
将bind修改为:
bind 0.0.0.0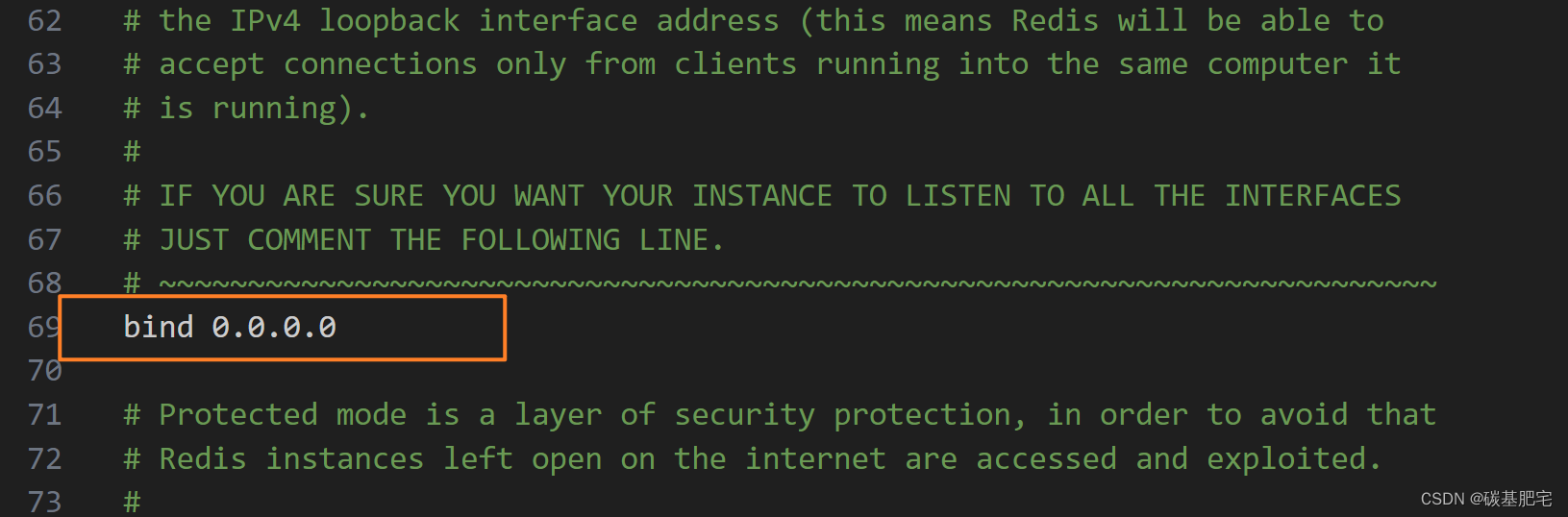
4.2 关闭保护模式
protected-mode no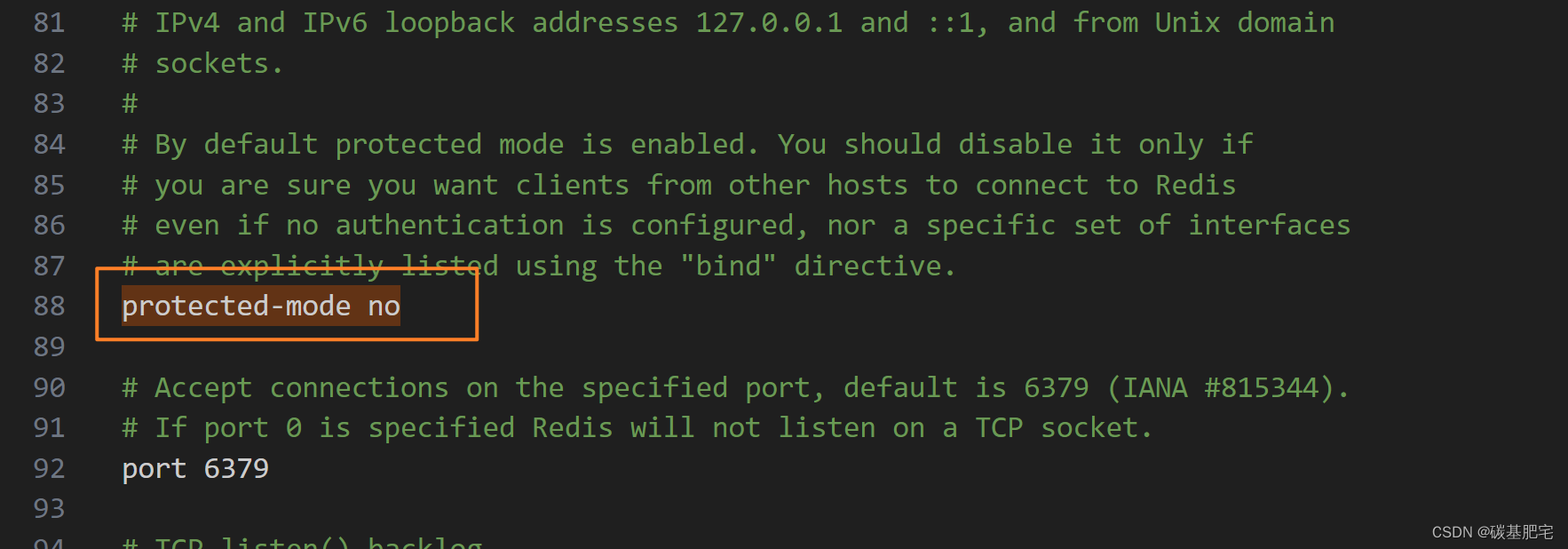
4.3 启动守护进程(后台进程)
daemonize yes
4.4 设置工作目录
先创建工作目录。
在Linux终端输入命令:
mkdir -p /var/lib/redis再在配置文件中设置工作目录:
dir /var/lib/redis
4.5 设置日志目录
先创建日志目录。Linux终端运行命令:
mkdir -p /var/log/redis/再在配置文件中设置日志目录:
logfile /var/log/redis/redis-server.log
完成上述步骤后,配置文件修改这步就做完了。在本地保存redis.conf,回到 xftp 传输工具,将本地的redis.conf拖回云服务器,覆盖云服务器的原文件即可。
5、启动 redis
命令:
redis-server /etc/redis/redis.conf
执行后,就启动了redis服务。可以用 netstat -anp | grep redis 命令查看该进程信息:

然后输入 redis-cli ,客户端连接服务器。

CTRL+D退出客户端程序。
6、停止 redis 服务
命令:
kill 进程id刚才通过 netstat -anp | grep redis 查看出redis服务的进程id(pid),通过 kill 杀死该进程即可。杀死后再运行 netstat -anp | grep redis ,不显示刚才的redis服务进程,即说明kill成功。
