怎么为自己的厂做网站企业管理平台app
文章目录
目录
文章目录
前言
一、下载PHP
二、下载composer
三、下载PHPstudy
四、下载think PHP
1.下载
2.多应用开发
前言
thinkPHP是一款开源的PHP框架,它是基于MVC(Model-View-Controller)设计模式构建的。thinkPHP提供了丰富的功能和组件,使得开发人员可以快速、高效地构建和维护Web应用程序。
以下是thinkPHP框架的一些特点和功能:
1.简单易用:thinkPHP提供了简洁的语法和易于理解的代码结构,使得开发人员可以迅速上手并快速开发应用程序。
2.灵活性:框架提供了丰富的扩展功能,可以轻松地集成第三方库和组件。同时,它也支持自定义配置和路由规则,使得开发人员能够根据自己的需求进行灵活的配置和定制。
3.性能优化:thinkPHP采用了多种性能优化技术,如缓存机制、代码自动加载、数据库连接池等,以提高应用程序的性能和响应速度。
4.安全性:框架内置了丰富的安全特性,如数据过滤、防止SQL注入、防止XSS攻击等,以确保应用程序的安全性和数据的完整性。
5.丰富的文档和社区支持:thinkPHP拥有详细的官方文档和活跃的开发社区,开发人员可以方便地查阅文档和获取技术支持。
总的来说,thinkPHP框架简化了PHP应用程序的开发过程,提高了开发效率和代码质量,是一个非常流行和成熟的PHP框架。
一、下载PHP
下载地址
ziaxPHP: Hypertext Preprocessor![]() https://www.php.net/按照图片步骤操作
https://www.php.net/按照图片步骤操作

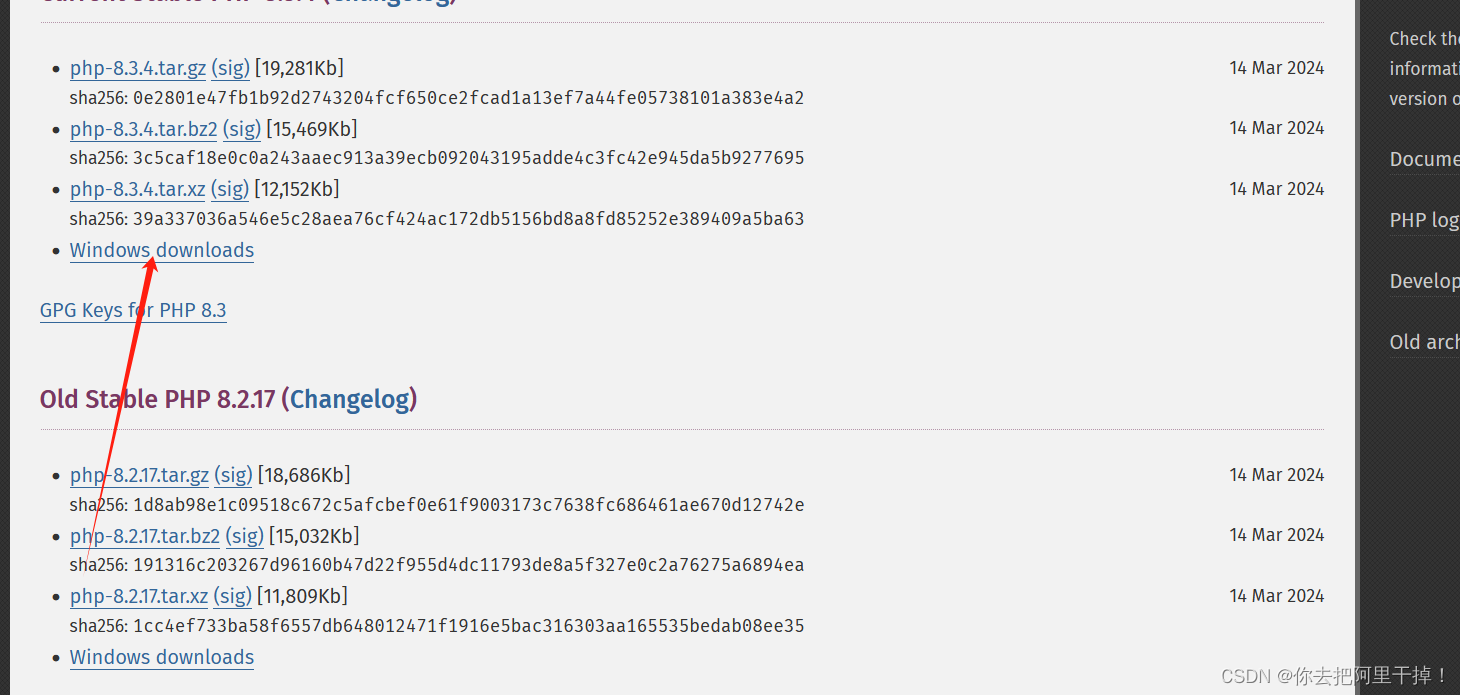
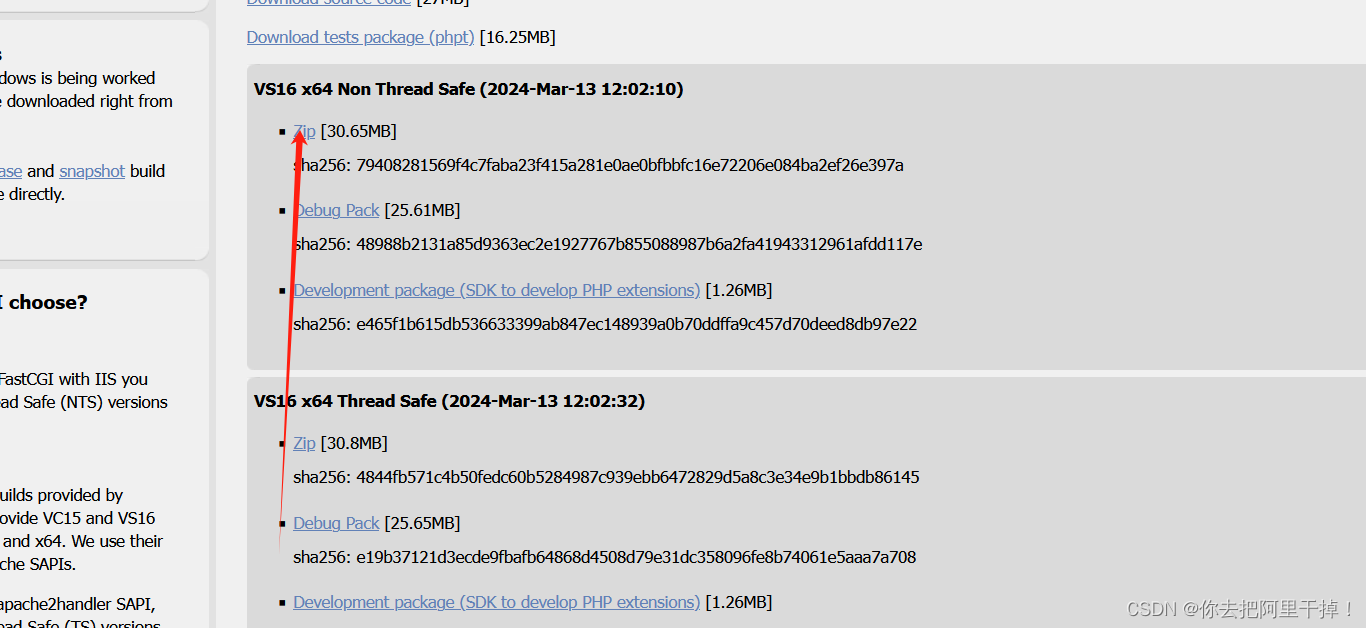
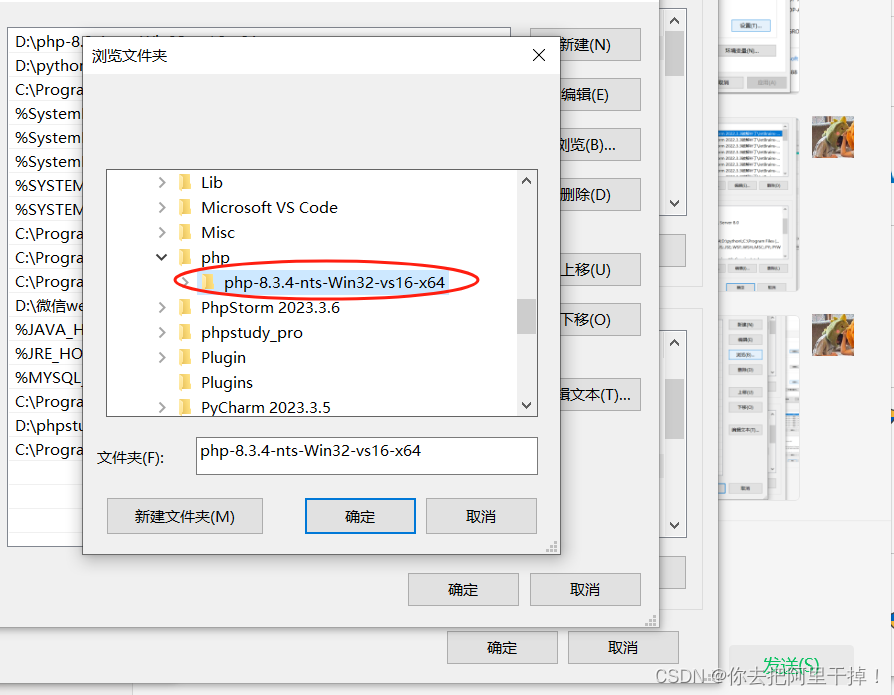
下载好后解压到你所想存放的磁盘,然后打开我的电脑右键属性进入点击高级系统设置,找到path点击编辑,然后添加文件地址,最后win+r回车后输入php -v,如果出现所安装的PHP版本则安装成功,安装步骤如下图






二、下载composer
Composer是一个PHP的依赖管理工具,可以用于管理项目中的PHP库和包的依赖关系。它可以帮助开发人员轻松地安装、更新和卸载项目所需的各种依赖库。Composer还可以自动解决依赖冲突问题,并且可以根据项目需要自动加载所需的库文件。使用Composer可以更好地组织和管理PHP项目的代码和依赖关系。
下载网ComposerA Dependency Manager for PHP![]() https://getcomposer.org/
https://getcomposer.org/
下载步骤如下

下载完成之后双击安装程序进行安装

选择你所下载的PHP文件中PHP.exe文件

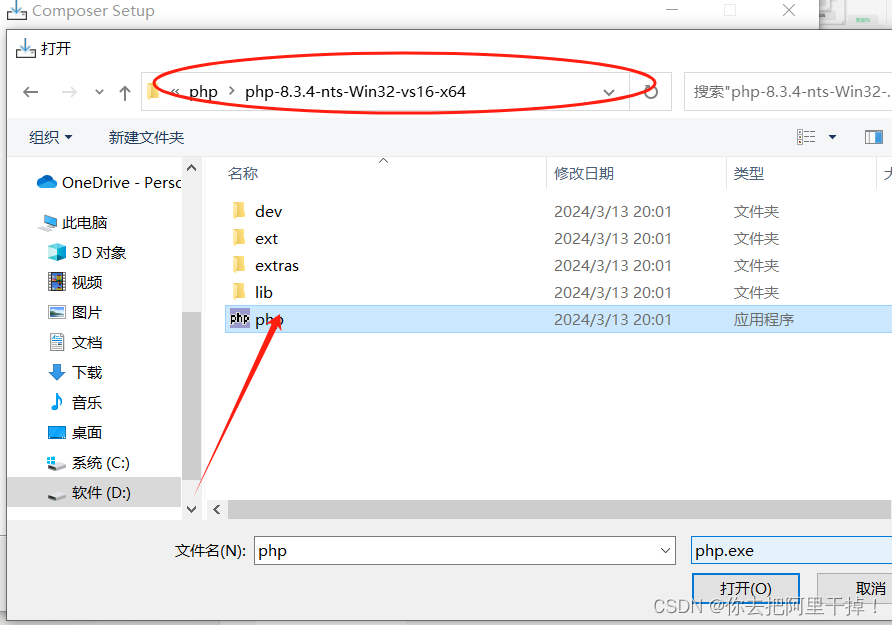
随后继续点下一步完成安装即可。
三、下载PHPstudy
网址:小皮面板(phpstudy) - 让天下没有难配的服务器环境!
这个安装较为简单就不演示了,就是下载之后一直点下一步安装即可
四、下载think PHP
1.下载
地址:
基础 · ThinkPHP6.0完全开发手册 · 看云
点击进入选择基础--》安装--》找到安装基础版复制里面的代码,然后win+r回车输入磁盘名进入你安装PHPstudy的磁盘,进入然后输入cd phpstudy/www回车之后粘贴刚才的代码回车进行安装


回车即可安装,安装完后命令行窗口先不要关闭,需要下载开发需要的一些东西
2.多应用开发
进入所安装的tp文件夹下,

回到官网按照下面步骤进行操作




最后回车运行即可
如果有小伙伴在安装途中出现问题欢迎向我提问