做透水砖的网站做优惠券网站如何引流
鲸参谋监测的京东平台10月份冰箱市场销售数据已出炉!
10月份,冰箱市场的销售额有小幅上涨。鲸参谋数据显示,在京东平台上,今年10月冰箱市场的销量为94万+,销售额将近23亿,同比增长超过1%。从价格上看,10月冰箱的市场均价也呈正向增长变动,环比增长约9%,同比增长约4%。

*数据源于鲸参谋-行业趋势分析(来自公开渠道获取与统计,数据仅供参考)
冰箱市场中,海尔品牌的市场占比排名第一,约30%,10月份海尔品牌的月销额将近7亿。除海尔外,美的和容声也是市场中的两大热销品牌,月销额均在3.5亿左右,市场占比均超过15%。此外,剩余品牌在市场中的占比不足5%。
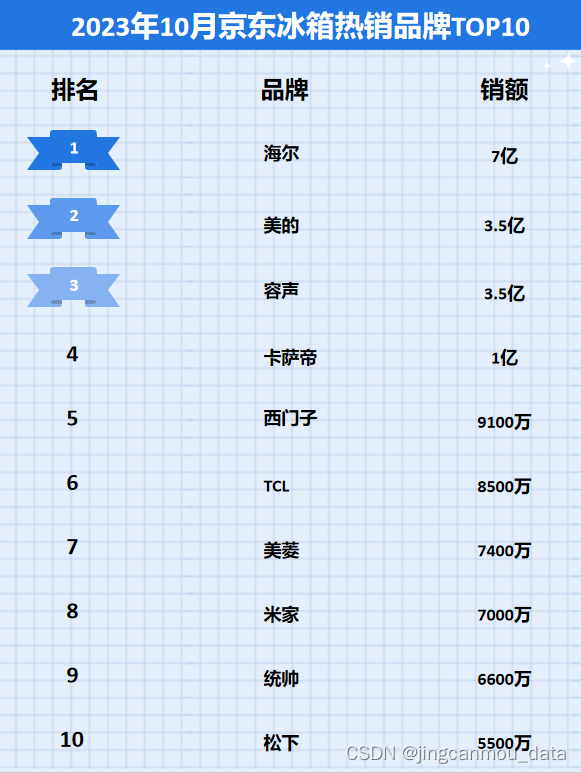
*数据源于鲸参谋-品牌排行分析(来自公开渠道获取与统计,数据仅供参考)
在热销店铺中,从店铺销售额来看,海尔京东自营旗舰店的单月销额排名第一,约3.1亿元,市场占比在14%左右;从销售增长角度来看,同比去年同期,容声冰箱京东自营旗舰店的销额涨幅较大,同比增长约71%。
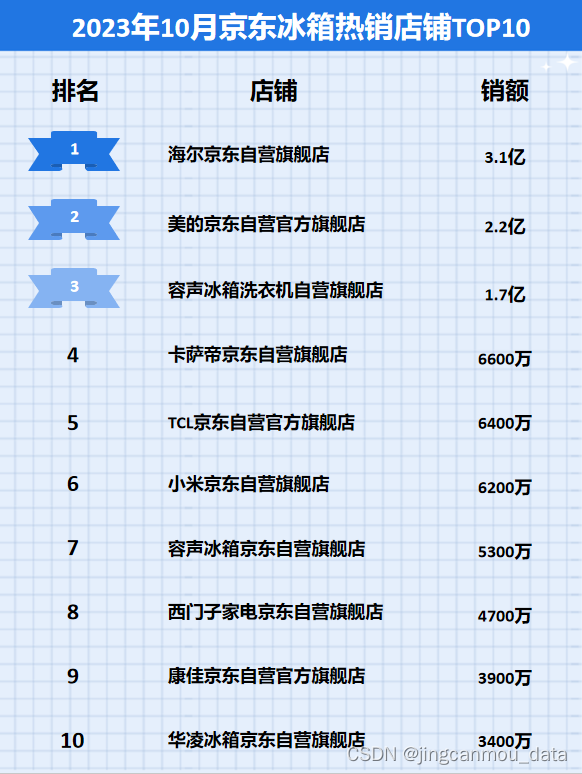
*数据源于鲸参谋-店铺排行分析(来自公开渠道获取与统计,数据仅供参考)
在热销商品TOP10榜单中,海尔品牌的“海尔(Haier)535升星辉对开门双开门电冰箱”和“海尔(Haier)465升十字对开双开四开多门电冰箱”这两款商品都比较热销,商品的月销额都在2400万左右。除海尔外,容声、卡萨帝等品牌的商品也有上榜。
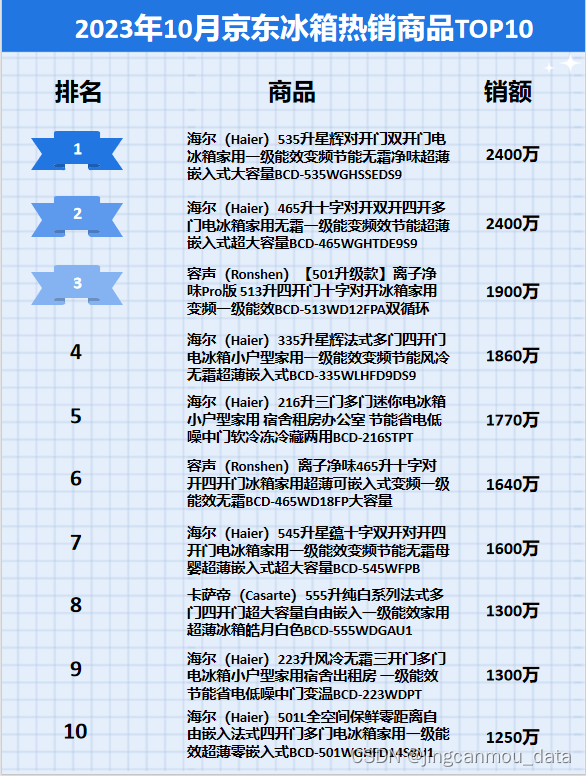
*数据源于鲸参谋-热销商品分析(来自公开渠道获取与统计,数据仅供参考)
鲸参谋数据来源于公开渠道,数据获取与统计可能存在不完全,分析结果仅供参考。
如想要查看京东(淘宝/天猫)全品类的销售数据(行业/品牌/店铺/商品/监控),欢迎搜索“鲸参谋电商数据”,或者直接评论留言和私信(也可接口对接)~