中职省级示范校建设网站wordpress 子分类模板
目录
- 一、环境部署
- 1.1操作系统初始化
- 二、部署etcd集群
- 2.1 准备签发证书环境
- 在 master01 节点上操作
- 在 node01与02 节点上操作
- 三、部署docker引擎
- 四、部署 Master 组件
- 4.1在 master01 节点上操
- 五、部署Worker Node组件
一、环境部署
| 集群 | IP | 组件 |
|---|---|---|
| k8s集群master01 | 192.168.243.100 | kube-apiserver kube-controller-manager kube-scheduler etcd |
| k8s集群master02 | 192.168.243.104 | |
| k8s集群node01 | 192.168.243.102 | kubelet kube-proxy docker |
| k8s集群node02 | 192.168.243.103 | |
| etcd集群节点1 | 192.168.243.100 | etcd |
| etcd集群节点2 | 192.168.243.102 | |
| etcd集群节点3 | 192.168.243.103 |
1.1操作系统初始化
#关闭防火墙
systemctl stop firewalld
systemctl disable firewalld
iptables -F && iptables -t nat -F && iptables -t mangle -F && iptables -X#关闭selinux
setenforce 0
sed -i 's/enforcing/disabled/' /etc/selinux/config#关闭swap
swapoff -a
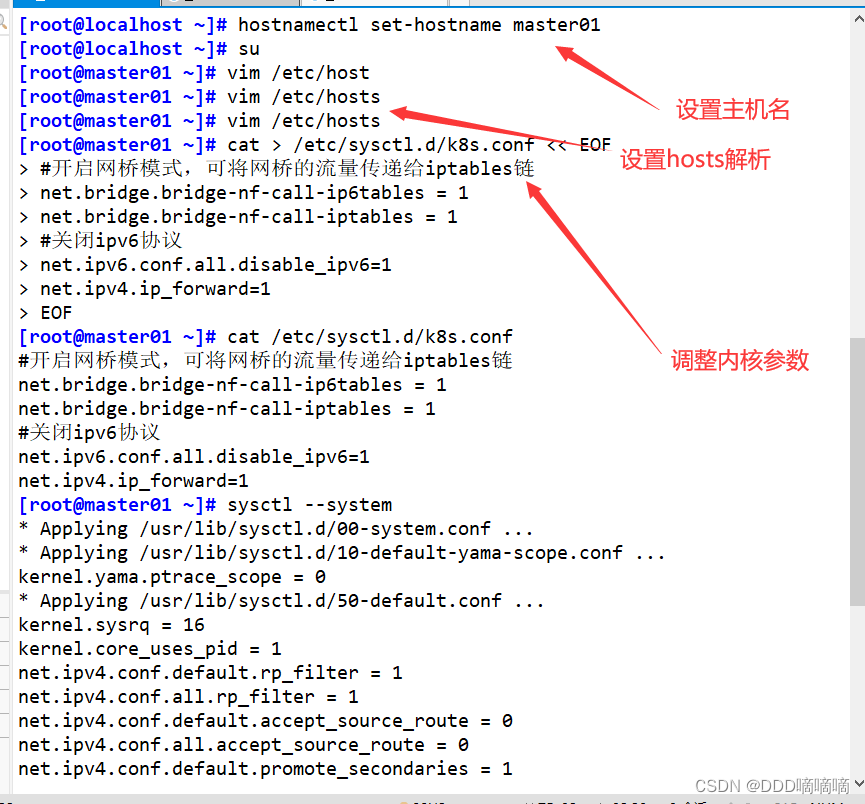
sed -ri 's/.*swap.*/#&/' /etc/fstab #根据规划设置主机名
hostnamectl set-hostname master01
hostnamectl set-hostname node01
hostnamectl set-hostname node02#在master添加hosts
cat >> /etc/hosts << EOF
192.168.80.10 master01
192.168.80.11 node01
192.168.80.12 node02
EOF#调整内核参数
cat > /etc/sysctl.d/k8s.conf << EOF
#开启网桥模式,可将网桥的流量传递给iptables链
net.bridge.bridge-nf-call-ip6tables = 1
net.bridge.bridge-nf-call-iptables = 1
#关闭ipv6协议
net.ipv6.conf.all.disable_ipv6=1
net.ipv4.ip_forward=1
EOFsysctl --system#时间同步
yum install ntpdate -y
ntpdate time.windows.com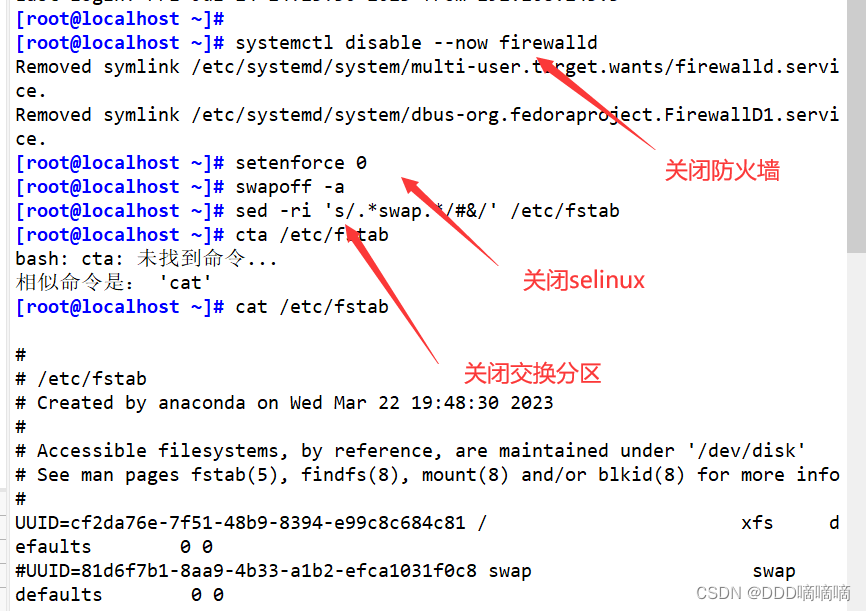

二、部署etcd集群
- etcd是CoreOS团队于2013年6月发起的开源项目,它的目标是构建一个高可用的分布式键值(key-value)数据库。etcd内部采用raft协议作为一致性算法,etcd是go语言编写的。
etcd 作为服务发现系统,有以下的特点:
简单:安装配置简单,而且提供了HTTP API进行交互,使用也很简单
安全:支持SSL证书验证
快速:单实例支持每秒2k+读操作
可靠:采用raft算法,实现分布式系统数据的可用性和一致性
- etcd 目前默认使用2379端口提供HTTP API服务, 2380端口和peer通信(这两个端口已经被IANA(互联网数字分配机构)官方预留给etcd)。 即etcd默认使用2379端口对外为客户端提供通讯,使用端口2380来进行服务器间内部通讯。
- etcd 在生产环境中一般推荐集群方式部署。由于etcd 的leader选举机制,要求至少为3台或以上的奇数台。
2.1 准备签发证书环境
- CFSSL 是 CloudFlare 公司开源的一款 PKI/TLS 工具。 CFSSL 包含一个命令行工具和一个用于签名、验证和捆绑 TLS 证书的 HTTP API 服务。使用Go语言编写。
- CFSSL 使用配置文件生成证书,因此自签之前,需要生成它识别的 json 格式的配置文件CFSSL 提供了方便的命令行生成配置文件。
- CFSSL 用来为 etcd 提供 TLS 证书,它支持签三种类型的证书:
1、client 证书,服务端连接客户端时携带的证书,用于客户端验证服务端身份,如 kube-apiserver 访问 etcd;
2、server 证书,客户端连接服务端时携带的证书,用于服务端验证客户端身份,如 etcd 对外提供服务;
3、peer 证书,相互之间连接时使用的证书,如 etcd 节点之间进行验证和通信。
这里全部都使用同一套证书认证。
在 master01 节点上操作
准备cfssl证书生成工具
wget https://pkg.cfssl.org/R1.2/cfssl_linux-amd64 -O /usr/local/bin/cfssl
wget https://pkg.cfssl.org/R1.2/cfssljson_linux-amd64 -O /usr/local/bin/cfssljson
wget https://pkg.cfssl.org/R1.2/cfssl-certinfo_linux-amd64 -O /usr/local/bin/cfssl-certinfochmod +x /usr/local/bin/cfssl*
cfssl:证书签发的工具命令
cfssljson:将 cfssl 生成的证书(json格式)变为文件承载式证书
cfssl-certinfo:验证证书的信息
cfssl-certinfo -cert <证书名称> #查看证书的信息

生成Etcd证书
mkdir /opt/k8s
cd /opt/k8s/#上传 etcd-cert.sh 和 etcd.sh 到 /opt/k8s/ 目录中
chmod +x etcd-cert.sh etcd.sh#创建用于生成CA证书、etcd 服务器证书以及私钥的目录
mkdir /opt/k8s/etcd-cert
mv etcd-cert.sh etcd-cert/
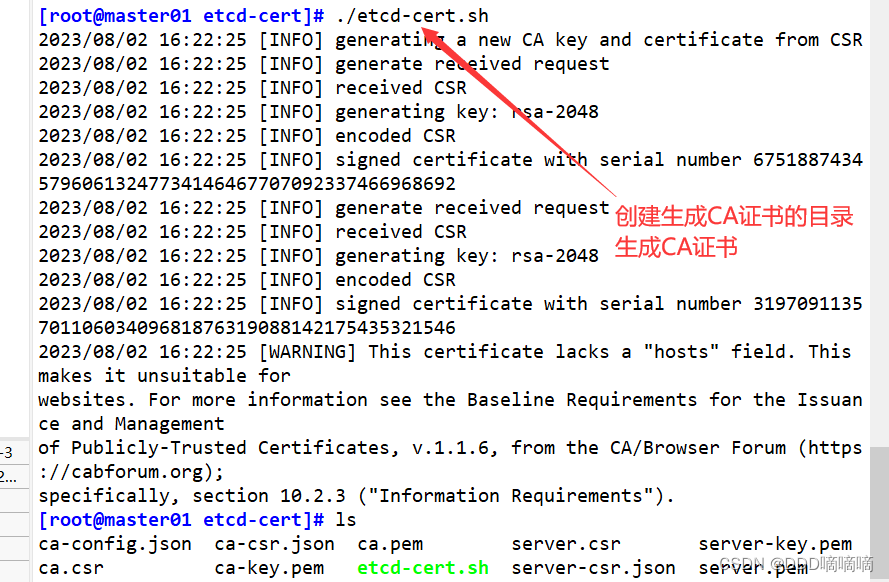
cd /opt/k8s/etcd-cert/
./etcd-cert.sh #生成CA证书、etcd 服务器证书以及私钥ls
ca-config.json ca-csr.json ca.pem server.csr server-key.pem
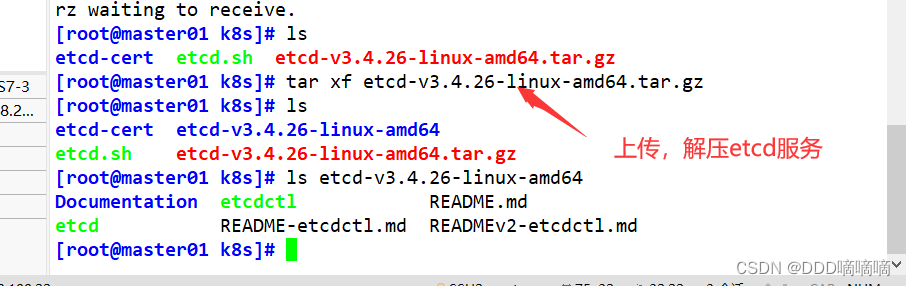
ca.csr ca-key.pem etcd-cert.sh server-csr.json server.pem#上传 etcd-v3.4.9-linux-amd64.tar.gz 到 /opt/k8s 目录中,启动etcd服务
cd /opt/k8s/
tar zxvf etcd-v3.4.9-linux-amd64.tar.gz
ls etcd-v3.4.9-linux-amd64
Documentation etcd etcdctl README-etcdctl.md README.md READMEv2-etcdctl.md
------------------------------------------------------------------------------------------
etcd就是etcd 服务的启动命令,后面可跟各种启动参数
etcdctl主要为etcd 服务提供了命令行操作
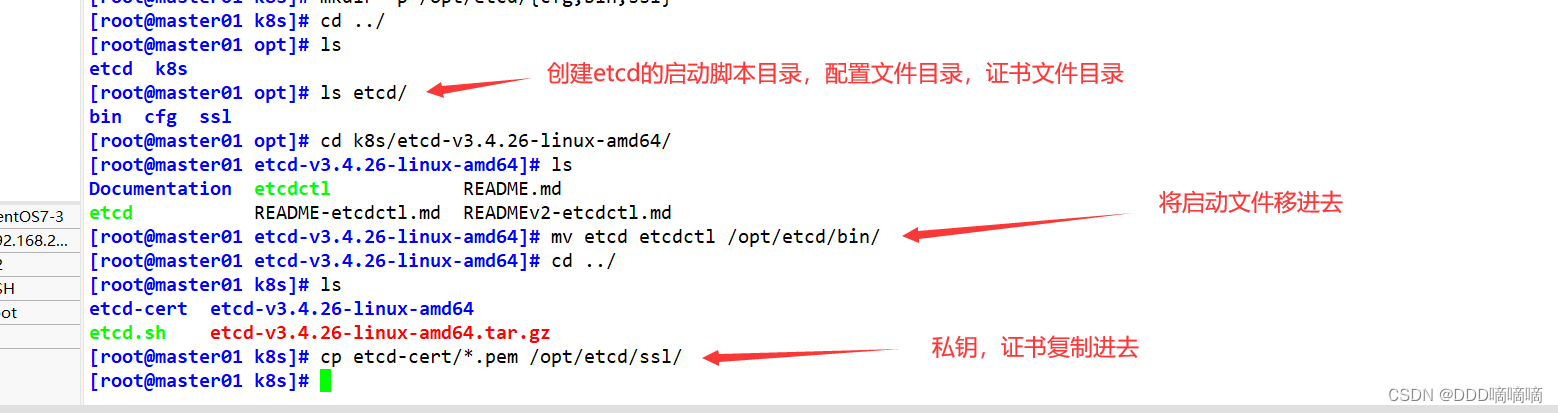
------------------------------------------------------------------------------------------#创建用于存放 etcd 配置文件,命令文件,证书的目录
mkdir -p /opt/etcd/{cfg,bin,ssl}cd /opt/k8s/etcd-v3.4.9-linux-amd64/
mv etcd etcdctl /opt/etcd/bin/
cp /opt/k8s/etcd-cert/*.pem /opt/etcd/ssl/cd /opt/k8s/
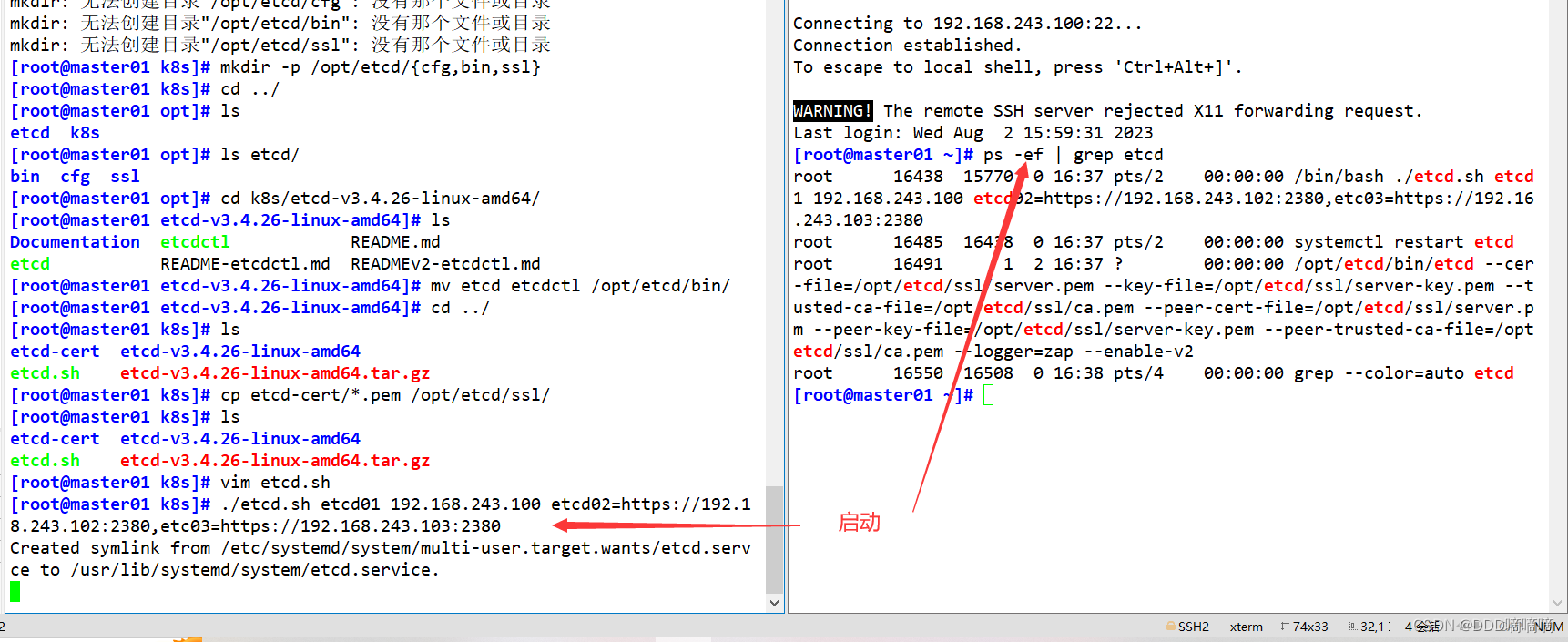
./etcd.sh etcd01 192.168.80.10 etcd02=https://192.168.80.11:2380,etcd03=https://192.168.80.12:2380
#进入卡住状态等待其他节点加入,这里需要三台etcd服务同时启动,如果只启动其中一台后,服务会卡在那里,直到集群中所有etcd节点都已启动,可忽略这个情况#可另外打开一个窗口查看etcd进程是否正常
ps -ef | grep etcd#把etcd相关证书文件、命令文件和服务管理文件全部拷贝到另外两个etcd集群节点
scp -r /opt/etcd/ root@192.168.80.11:/opt/
scp -r /opt/etcd/ root@192.168.80.12:/opt/
scp /usr/lib/systemd/system/etcd.service root@192.168.80.11:/usr/lib/systemd/system/
scp /usr/lib/systemd/system/etcd.service root@192.168.80.12:/usr/lib/systemd/system/

在 node01与02 节点上操作
vim /opt/etcd/cfg/etcd
#[Member]
ETCD_NAME="etcd02" #修改
ETCD_DATA_DIR="/var/lib/etcd/default.etcd"
ETCD_LISTEN_PEER_URLS="https://192.168.80.11:2380" #修改
ETCD_LISTEN_CLIENT_URLS="https://192.168.80.11:2379" #修改#[Clustering]
ETCD_INITIAL_ADVERTISE_PEER_URLS="https://192.168.80.11:2380" #修改
ETCD_ADVERTISE_CLIENT_URLS="https://192.168.80.11:2379" #修改
ETCD_INITIAL_CLUSTER="etcd01=https://192.168.80.10:2380,etcd02=https://192.168.80.11:2380,etcd03=https://192.168.80.12:2380"
ETCD_INITIAL_CLUSTER_TOKEN="etcd-cluster"
ETCD_INITIAL_CLUSTER_STATE="new"#启动etcd服务
systemctl start etcd
systemctl enable etcd
systemctl status etcd//在 node02 节点上操作
vim /opt/etcd/cfg/etcd
#[Member]
ETCD_NAME="etcd03" #修改
ETCD_DATA_DIR="/var/lib/etcd/default.etcd"
ETCD_LISTEN_PEER_URLS="https://192.168.80.12:2380" #修改
ETCD_LISTEN_CLIENT_URLS="https://192.168.80.12:2379" #修改#[Clustering]
ETCD_INITIAL_ADVERTISE_PEER_URLS="https://192.168.80.12:2380" #修改
ETCD_ADVERTISE_CLIENT_URLS="https://192.168.80.12:2379" #修改
ETCD_INITIAL_CLUSTER="etcd01=https://192.168.80.10:2380,etcd02=https://192.168.80.11:2380,etcd03=https://192.168.80.12:2380"
ETCD_INITIAL_CLUSTER_TOKEN="etcd-cluster"
ETCD_INITIAL_CLUSTER_STATE="new"#启动etcd服务
systemctl start etcd
systemctl enable etcd
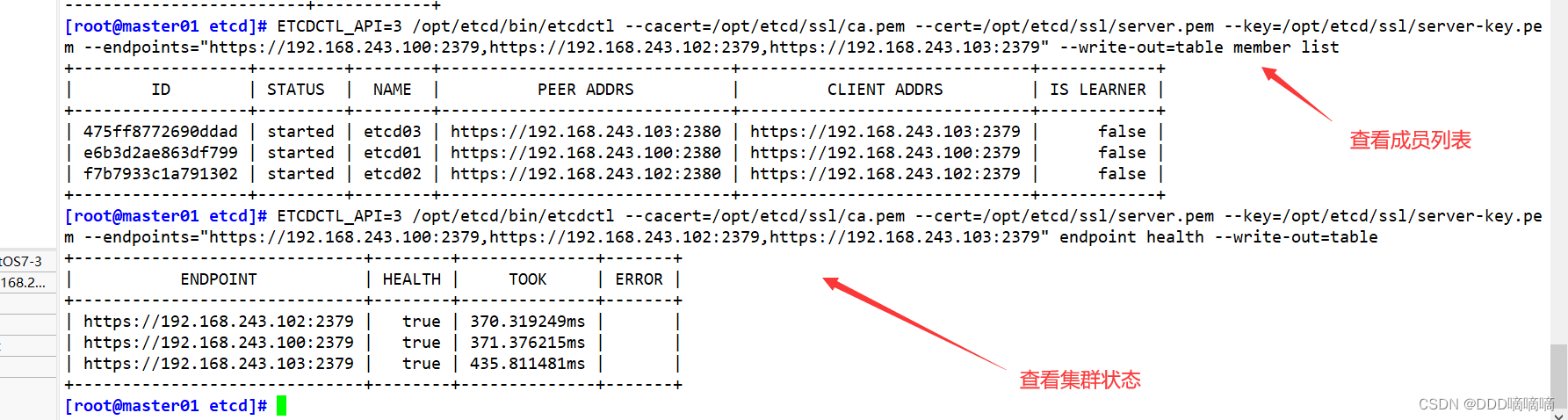
systemctl status etcd#检查etcd群集状态
ETCDCTL_API=3 /opt/etcd/bin/etcdctl --cacert=/opt/etcd/ssl/ca.pem --cert=/opt/etcd/ssl/server.pem --key=/opt/etcd/ssl/server-key.pem --endpoints="https://192.168.80.10:2379,https://192.168.80.11:2379,https://192.168.80.12:2379" endpoint health --write-out=table------------------------------------------------------------------------------------------
--cert-file:识别HTTPS端使用SSL证书文件
--key-file:使用此SSL密钥文件标识HTTPS客户端
--ca-file:使用此CA证书验证启用https的服务器的证书
--endpoints:集群中以逗号分隔的机器地址列表
cluster-health:检查etcd集群的运行状况
------------------------------------------------------------------------------------------#查看etcd集群成员列表
ETCDCTL_API=3 /opt/etcd/bin/etcdctl --cacert=/opt/etcd/ssl/ca.pem --cert=/opt/etcd/ssl/server.pem --key=/opt/etcd/ssl/server-key.pem --endpoints="https://192.168.80.10:2379,https://192.168.80.11:2379,https://192.168.80.12:2379" --write-out=table member list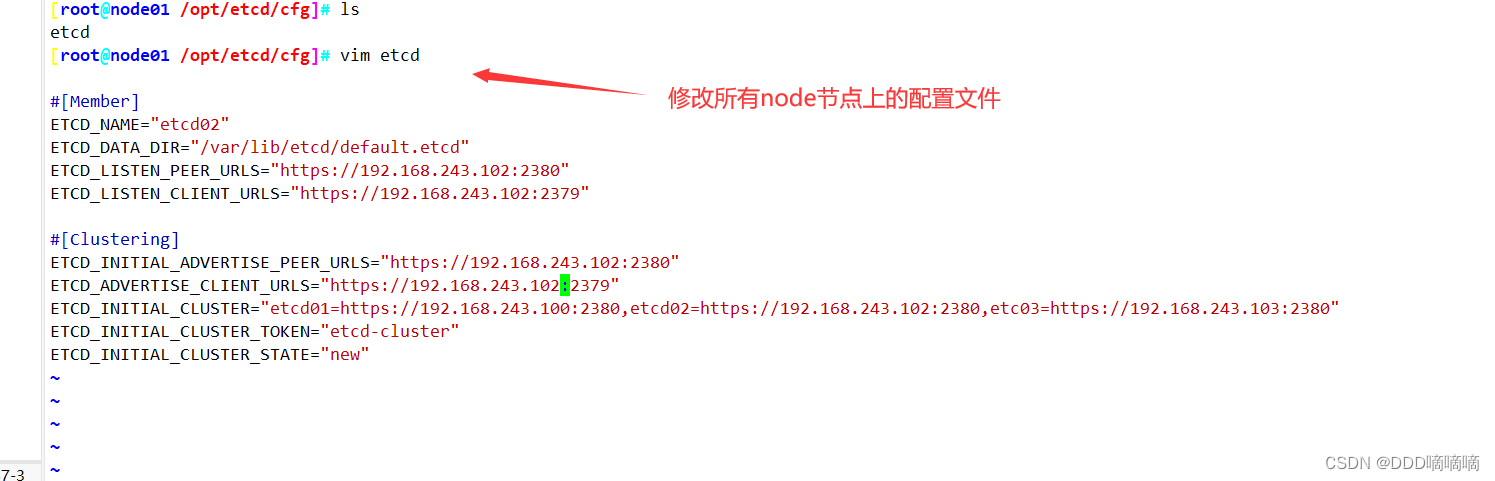
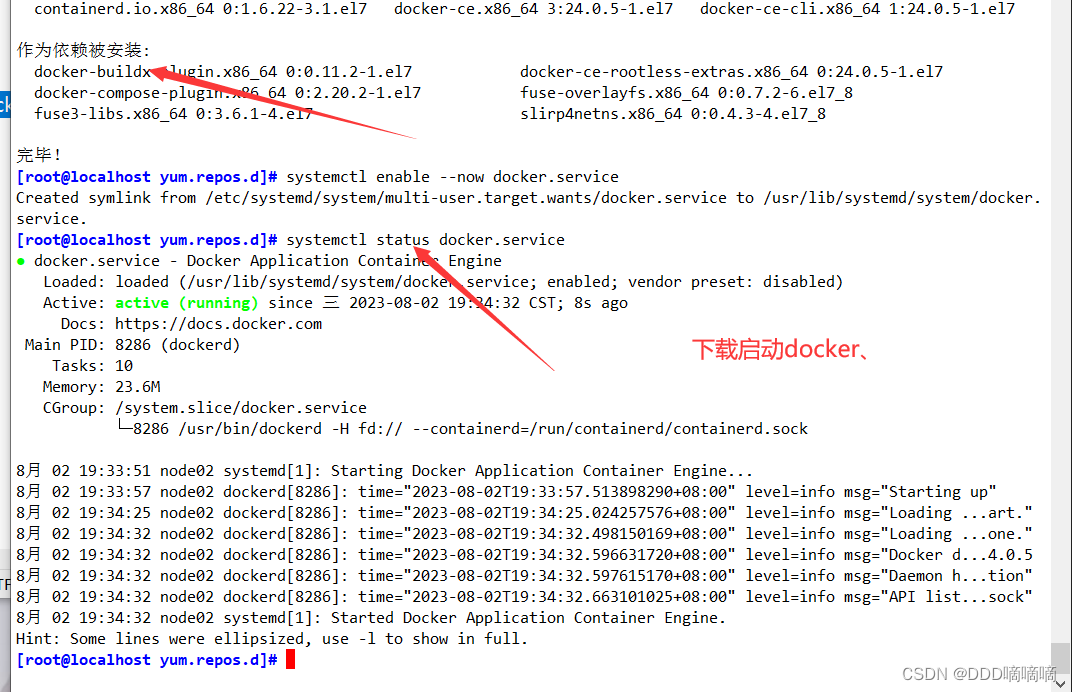
三、部署docker引擎
/所有 node 节点部署docker引擎
yum install -y yum-utils device-mapper-persistent-data lvm2
yum-config-manager --add-repo https://mirrors.aliyun.com/docker-ce/linux/centos/docker-ce.repo
yum install -y docker-ce docker-ce-cli containerd.iosystemctl start docker.service
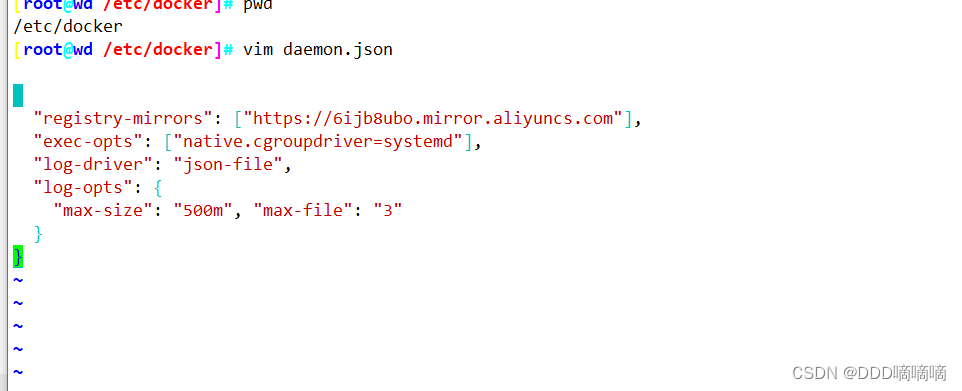
systemctl enable docker.service vim /etc/docker/daemon.json
{"registry-mirrors": ["https://6ijb8ubo.mirror.aliyuncs.com"],"exec-opts": ["native.cgroupdriver=systemd"],"log-driver": "json-file","log-opts": {"max-size": "500m", "max-file": "3"}
}
四、部署 Master 组件
4.1在 master01 节点上操
#上传 master.zip 和 k8s-cert.sh 到 /opt/k8s 目录中,解压 master.zip 压缩包
cd /opt/k8s/
unzip master.zip
chmod +x *.sh#创建kubernetes工作目录
mkdir -p /opt/kubernetes/{bin,cfg,ssl,logs}#创建用于生成CA证书、相关组件的证书和私钥的目录
mkdir /opt/k8s/k8s-cert
mv /opt/k8s/k8s-cert.sh /opt/k8s/k8s-cert
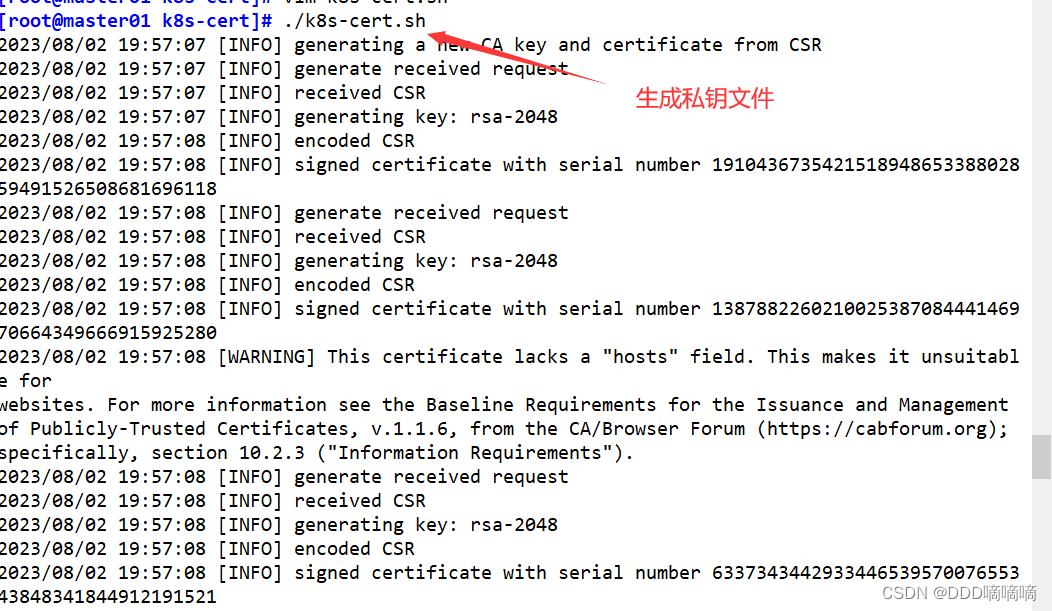
cd /opt/k8s/k8s-cert/
./k8s-cert.sh #生成CA证书、相关组件的证书和私钥ls *pem
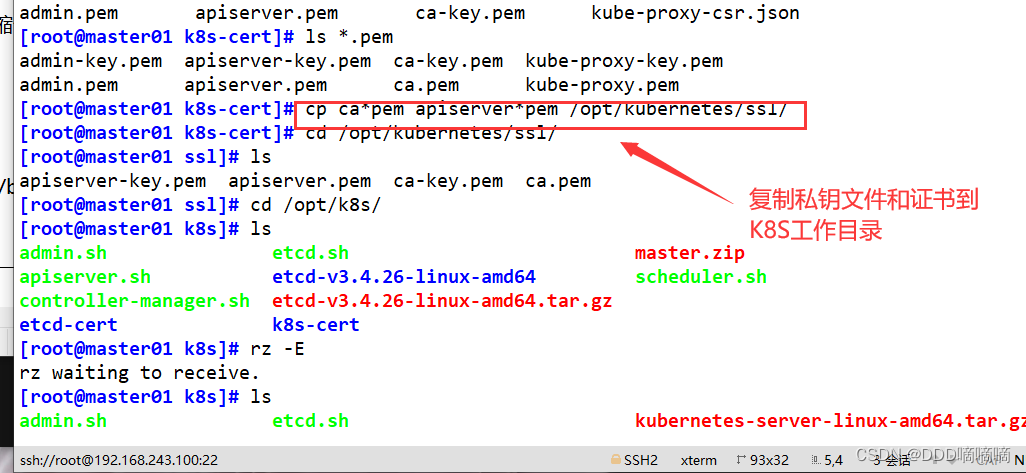
admin-key.pem apiserver-key.pem ca-key.pem kube-proxy-key.pem
admin.pem apiserver.pem ca.pem kube-proxy.pem#复制CA证书、apiserver相关证书和私钥到 kubernetes工作目录的 ssl 子目录中
cp ca*pem apiserver*pem /opt/kubernetes/ssl/#上传 kubernetes-server-linux-amd64.tar.gz 到 /opt/k8s/ 目录中,解压 kubernetes 压缩包
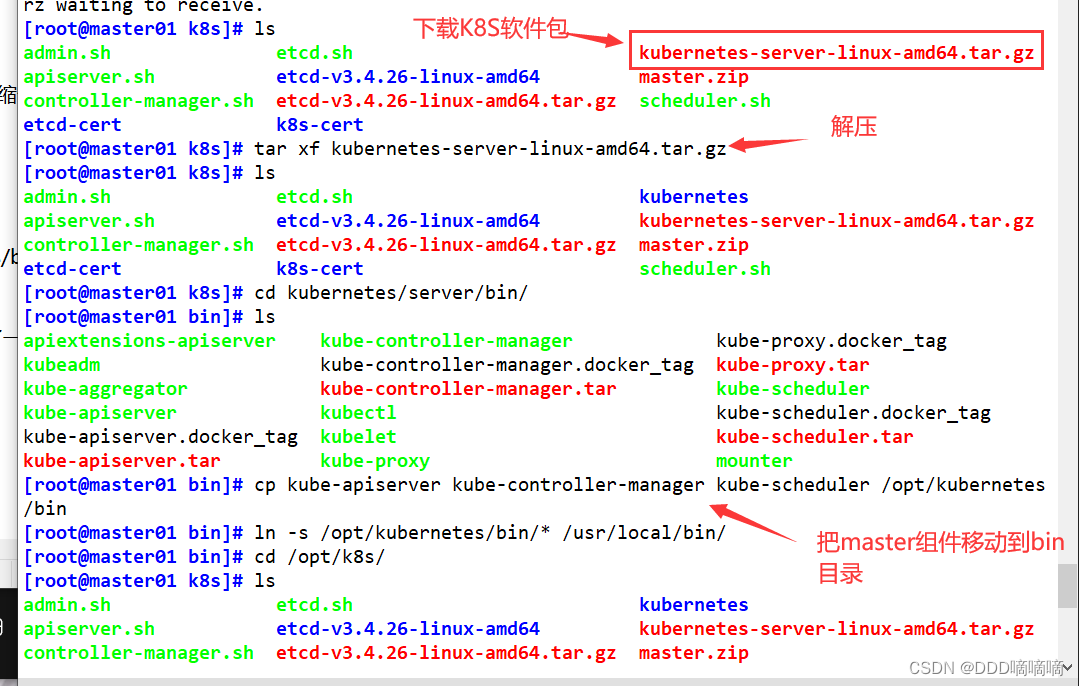
cd /opt/k8s/
tar zxvf kubernetes-server-linux-amd64.tar.gz#复制master组件的关键命令文件到 kubernetes工作目录的 bin 子目录中
cd /opt/k8s/kubernetes/server/bin
cp kube-apiserver kubectl kube-controller-manager kube-scheduler /opt/kubernetes/bin/
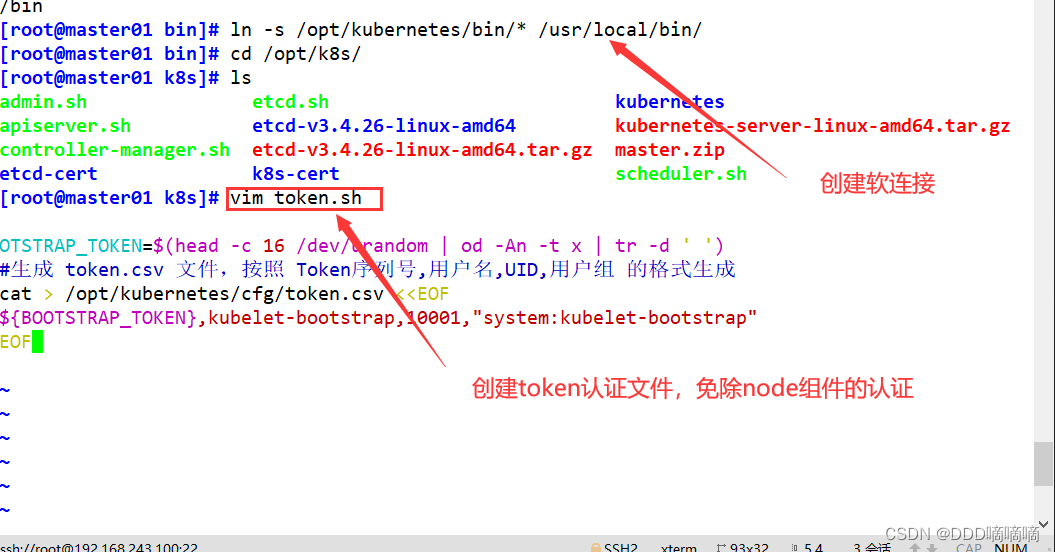
ln -s /opt/kubernetes/bin/* /usr/local/bin/#创建 bootstrap token 认证文件,apiserver 启动时会调用,然后就相当于在集群内创建了一个这个用户,接下来就可以用 RBAC 给他授权
cd /opt/k8s/
vim token.sh
#!/bin/bash
#获取随机数前16个字节内容,以十六进制格式输出,并删除其中空格
BOOTSTRAP_TOKEN=$(head -c 16 /dev/urandom | od -An -t x | tr -d ' ')
#生成 token.csv 文件,按照 Token序列号,用户名,UID,用户组 的格式生成
cat > /opt/kubernetes/cfg/token.csv <<EOF
${BOOTSTRAP_TOKEN},kubelet-bootstrap,10001,"system:kubelet-bootstrap"
EOFchmod +x token.sh
./token.shcat /opt/kubernetes/cfg/token.csv#二进制文件、token、证书都准备好后,开启 apiserver 服务
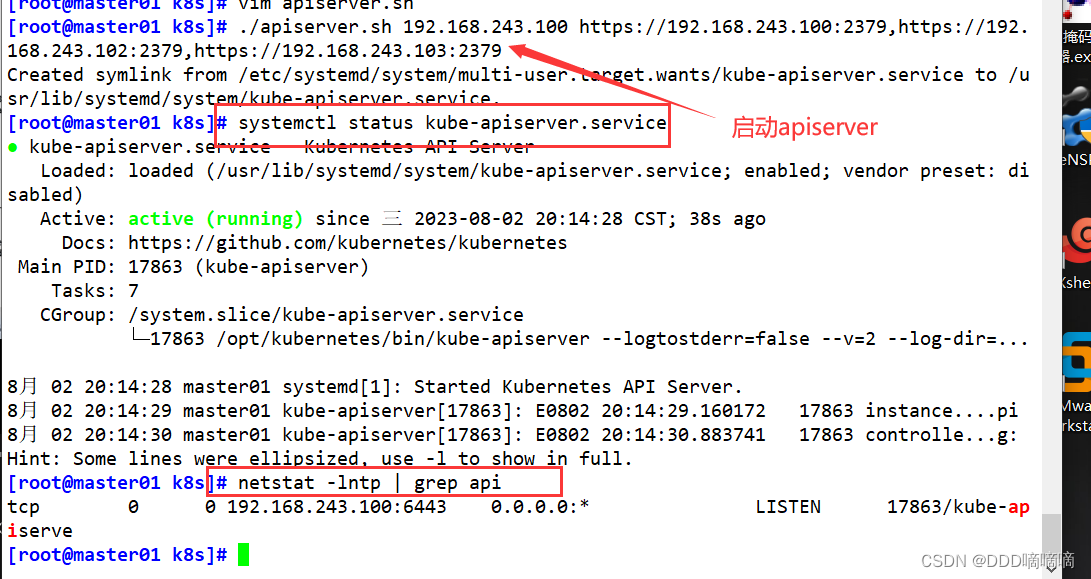
cd /opt/k8s/
./apiserver.sh 192.168.80.10 https://192.168.80.10:2379,https://192.168.80.11:2379,https://192.168.80.12:2379#检查进程是否启动成功
ps aux | grep kube-apiservernetstat -natp | grep 6443 #安全端口6443用于接收HTTPS请求,用于基于Token文件或客户端证书等认证#启动 scheduler 服务
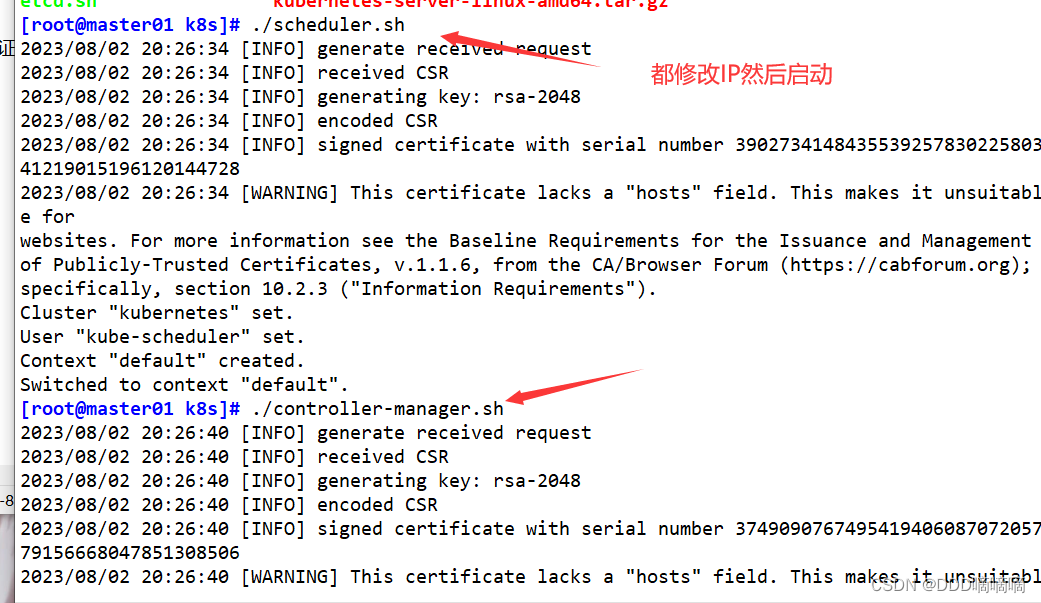
cd /opt/k8s/
./scheduler.sh
ps aux | grep kube-scheduler#启动 controller-manager 服务
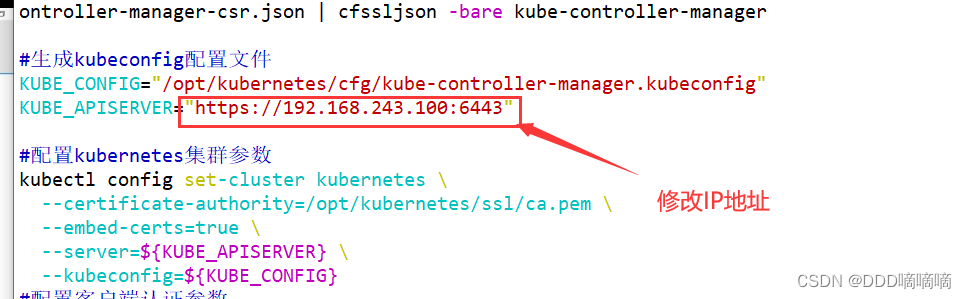
./controller-manager.sh
ps aux | grep kube-controller-manager#生成kubectl连接集群的kubeconfig文件
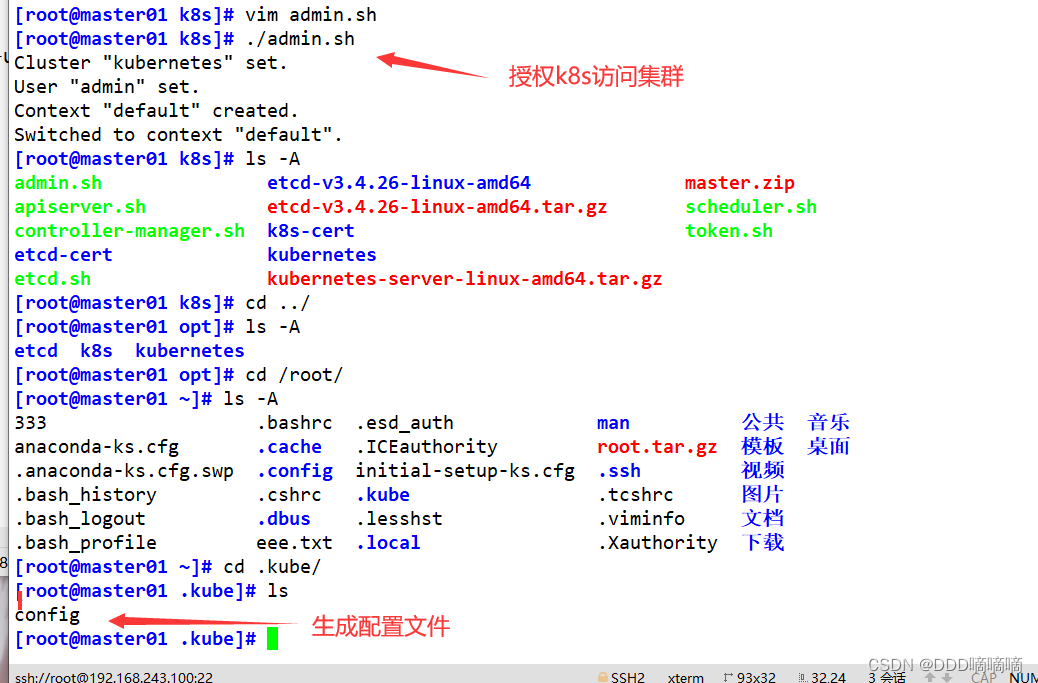
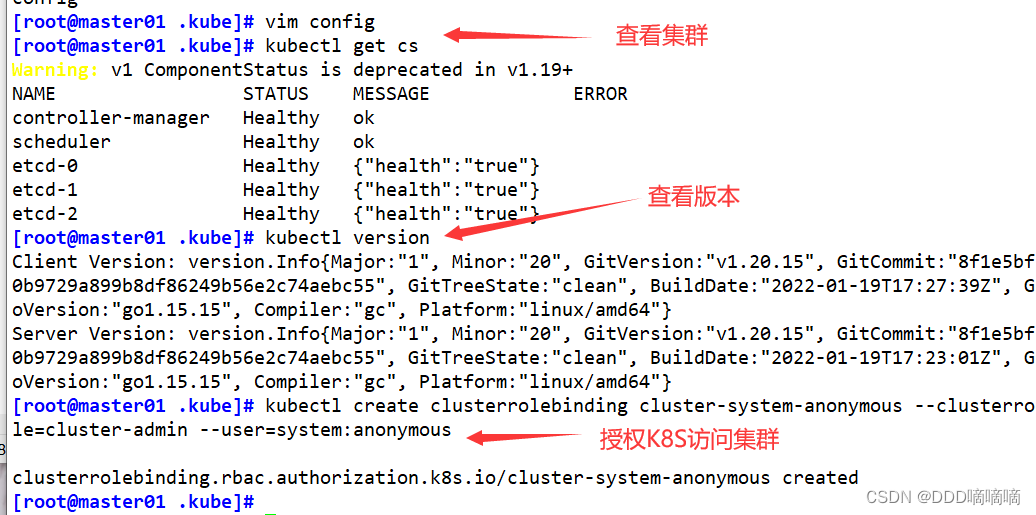
./admin.sh#绑定默认cluster-admin管理员集群角色,授权kubectl访问集群
kubectl create clusterrolebinding cluster-system-anonymous --clusterrole=cluster-admin --user=system:anonymous#通过kubectl工具查看当前集群组件状态
kubectl get cs
NAME STATUS MESSAGE ERROR
controller-manager Healthy ok
scheduler Healthy ok
etcd-2 Healthy {"health":"true"}
etcd-1 Healthy {"health":"true"}
etcd-0 Healthy {"health":"true"} #查看版本信息
kubectl version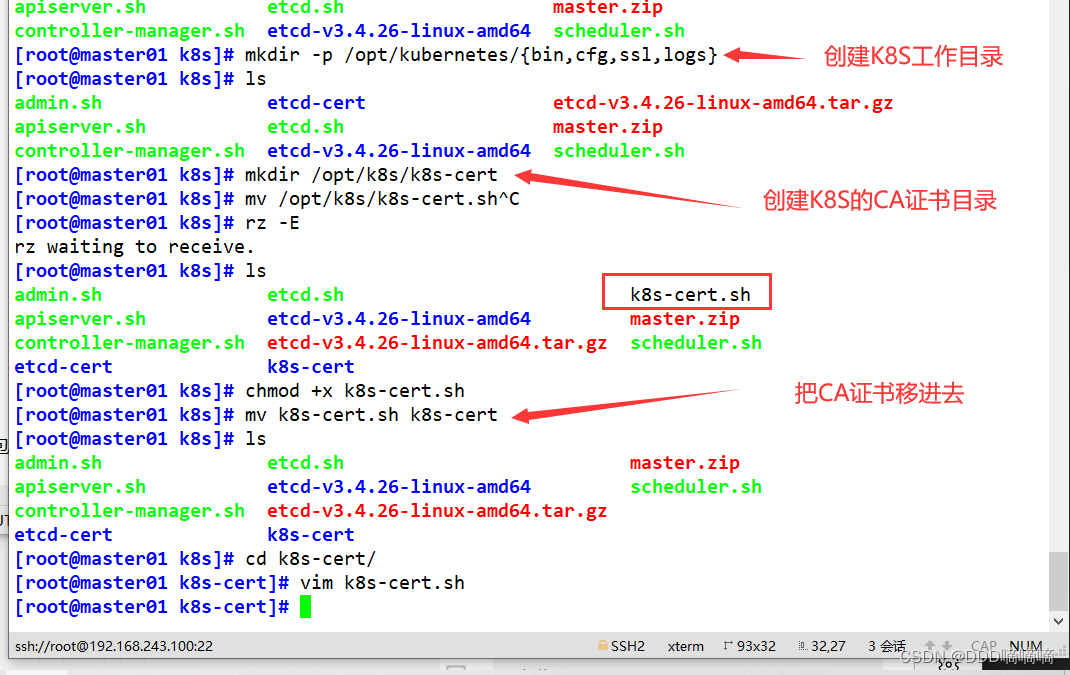

五、部署Worker Node组件
在所有 node 节点上操作
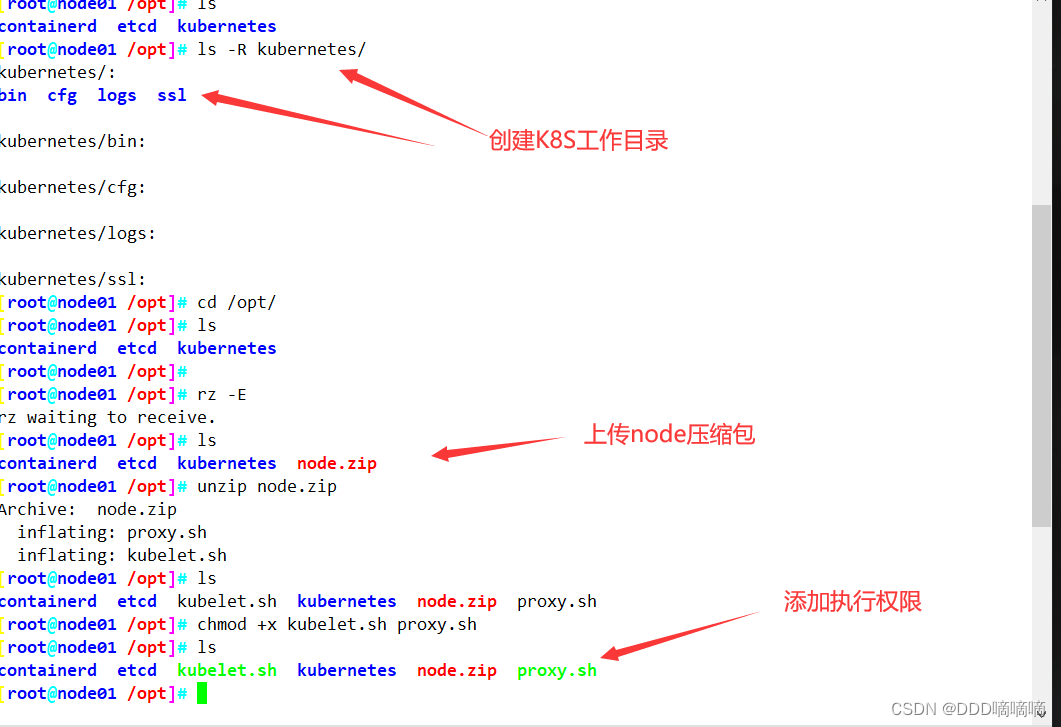
#创建kubernetes工作目录
mkdir -p /opt/kubernetes/{bin,cfg,ssl,logs}#上传 node.zip 到 /opt 目录中,解压 node.zip 压缩包,获得kubelet.sh、proxy.sh
cd /opt/
unzip node.zip
chmod +x kubelet.sh proxy.sh
在 master01 节点上操作
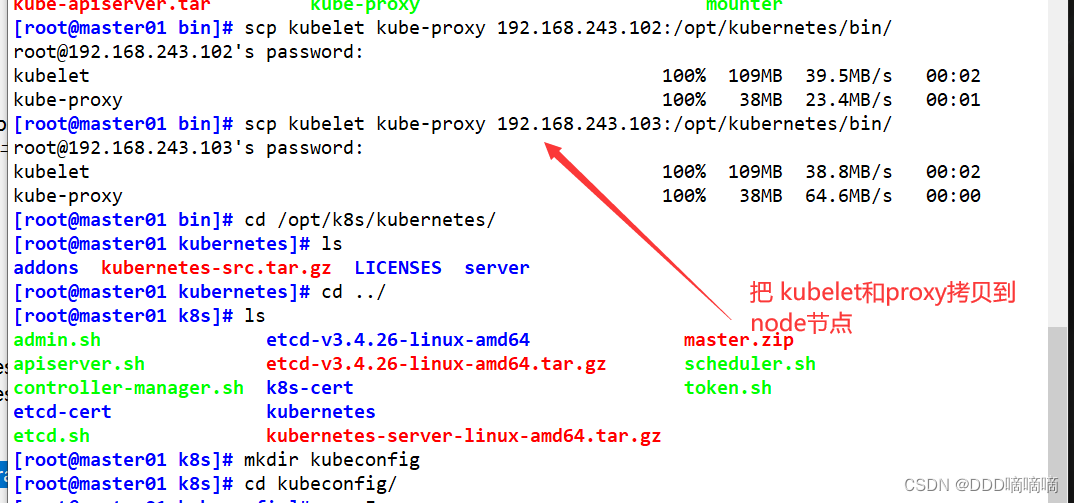
#把 kubelet、kube-proxy 拷贝到 node 节点
cd /opt/k8s/kubernetes/server/bin
scp kubelet kube-proxy root@192.168.80.11:/opt/kubernetes/bin/
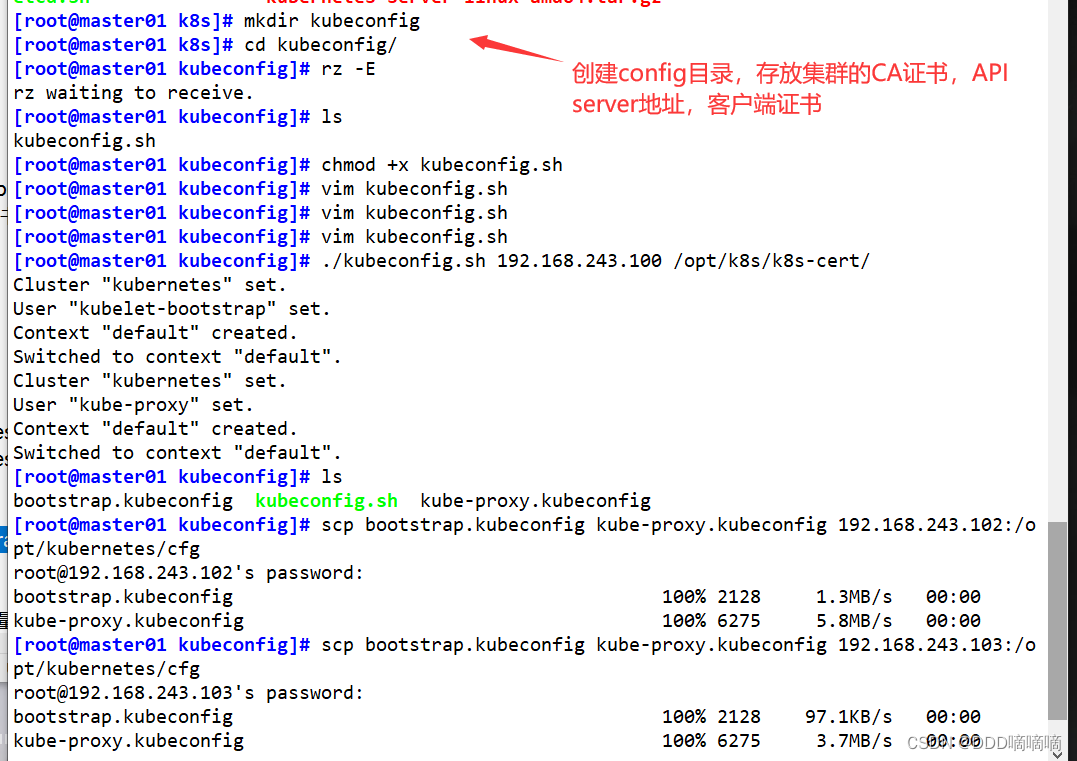
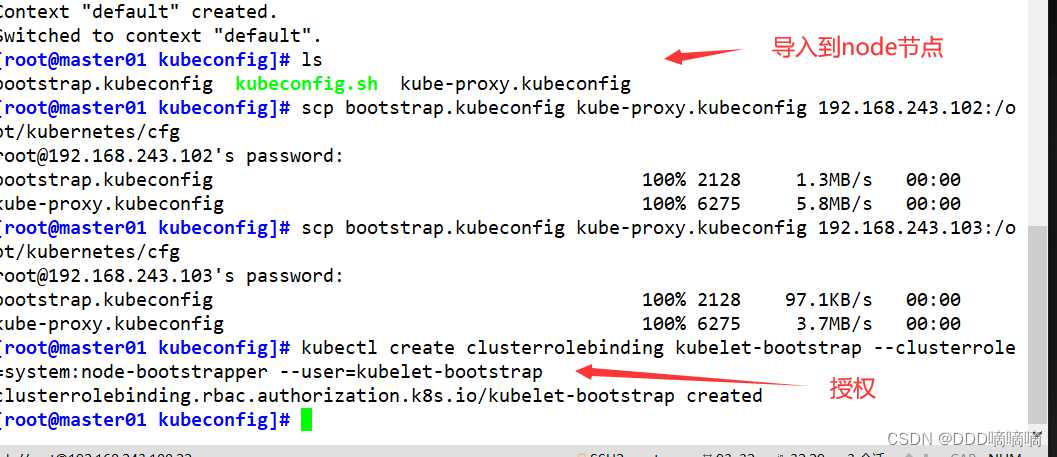
scp kubelet kube-proxy root@192.168.80.12:/opt/kubernetes/bin/#上传kubeconfig.sh文件到/opt/k8s/kubeconfig目录中,生成kubelet初次加入集群引导kubeconfig文件和kube-proxy.kubeconfig文件
#kubeconfig 文件包含集群参数(CA 证书、API Server 地址),客户端参数(上面生成的证书和私钥),集群 context 上下文参数(集群名称、用户名)。Kubenetes 组件(如 kubelet、kube-proxy)通过启动时指定不同的 kubeconfig 文件可以切换到不同的集群,连接到 apiserver。
mkdir /opt/k8s/kubeconfigcd /opt/k8s/kubeconfig
chmod +x kubeconfig.sh
./kubeconfig.sh 192.168.80.10 /opt/k8s/k8s-cert/#把配置文件 bootstrap.kubeconfig、kube-proxy.kubeconfig 拷贝到 node 节点
scp bootstrap.kubeconfig kube-proxy.kubeconfig root@192.168.80.11:/opt/kubernetes/cfg/
scp bootstrap.kubeconfig kube-proxy.kubeconfig root@192.168.80.12:/opt/kubernetes/cfg/#RBAC授权,使用户 kubelet-bootstrap 能够有权限发起 CSR 请求证书
kubectl create clusterrolebinding kubelet-bootstrap --clusterrole=system:node-bootstrapper --user=kubelet-bootstrap
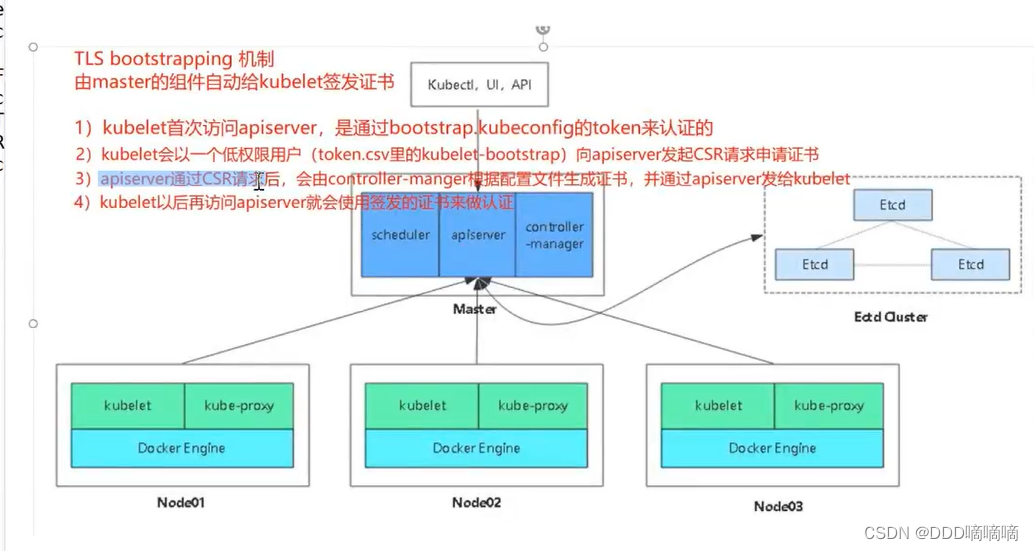
- kubelet 采用 TLS Bootstrapping 机制,自动完成到 kube-apiserver 的注册,在 node 节点量较大或者后期自动扩容时非常有用。
Master apiserver 启用 TLS 认证后,node 节点 kubelet 组件想要加入集群,必须使用CA签发的有效证书才能与 apiserver 通信,当 node 节点很多时,签署证书是一件很繁琐的事情。因此 Kubernetes 引入了 TLS bootstraping 机制来自动颁发客户端证书,kubelet 会以一个低权限用户自动向 apiserver 申请证书,kubelet 的证书由 apiserver 动态签署。
- kubelet 首次启动通过加载 bootstrap.kubeconfig 中的用户 Token 和 apiserver CA 证书发起首次 CSR 请求,这个 Token 被预先内置在 apiserver 节点的 token.csv 中,其身份为 kubelet-bootstrap 用户和 system:kubelet-bootstrap 用户组;想要首次 CSR 请求能成功(即不会被 apiserver 401 拒绝),则需要先创建一个 ClusterRoleBinding,将 kubelet-bootstrap 用户和 system:node-bootstrapper 内置 ClusterRole 绑定(通过 kubectl get clusterroles 可查询),使其能够发起 CSR 认证请求。
- TLS bootstrapping 时的证书实际是由 kube-controller-manager 组件来签署的,也就是说证书有效期是 kube-controller-manager 组件控制的;kube-controller-manager 组件提供了一个 --experimental-cluster-signing-duration 参数来设置签署的证书有效时间;默认为 8760h0m0s,将其改为 87600h0m0s,即 10 年后再进行 TLS bootstrapping 签署证书即可。
- 也就是说 kubelet 首次访问 API Server 时,是使用 token 做认证,通过后,Controller Manager 会为 kubelet 生成一个证书,以后的访问都是用证书做认证了。
在 node01 节点上操作
#启动 kubelet 服务
cd /opt/
./kubelet.sh 192.168.80.11
ps aux | grep kubelet

在 master01 节点上操作,通过 CSR 请求
#检查到 node01 节点的 kubelet 发起的 CSR 请求,Pending 表示等待集群给该节点签发证书
kubectl get csr
NAME AGE SIGNERNAME REQUESTOR CONDITION
node-csr-duiobEzQ0R93HsULoS9NT9JaQylMmid_nBF3Ei3NtFE 12s kubernetes.io/kube-apiserver-client-kubelet kubelet-bootstrap Pending#通过 CSR 请求
kubectl certificate approve node-csr-duiobEzQ0R93HsULoS9NT9JaQylMmid_nBF3Ei3NtFE#Approved,Issued 表示已授权 CSR 请求并签发证书
kubectl get csr
NAME AGE SIGNERNAME REQUESTOR CONDITION
node-csr-duiobEzQ0R93HsULoS9NT9JaQylMmid_nBF3Ei3NtFE 2m5s kubernetes.io/kube-apiserver-client-kubelet kubelet-bootstrap Approved,Issued#查看节点,由于网络插件还没有部署,节点会没有准备就绪 NotReady
kubectl get node
NAME STATUS ROLES AGE VERSION
192.168.80.11 NotReady <none> 108s v1.20.11#master自动发现node节点
kubectl create clusterrolebinding node-autoapprove-bootstrap --clusterrole=system:certificates.k8s.io:certificatesigningrequests:nodeclient --user=kubelet-bootstrap kubectl create clusterrolebinding node-autoapprove-certificate-rotation --clusterrole=system:certificates.k8s.io:certificatesigningrequests:selfnodeclient --user=kubelet-bootstrap

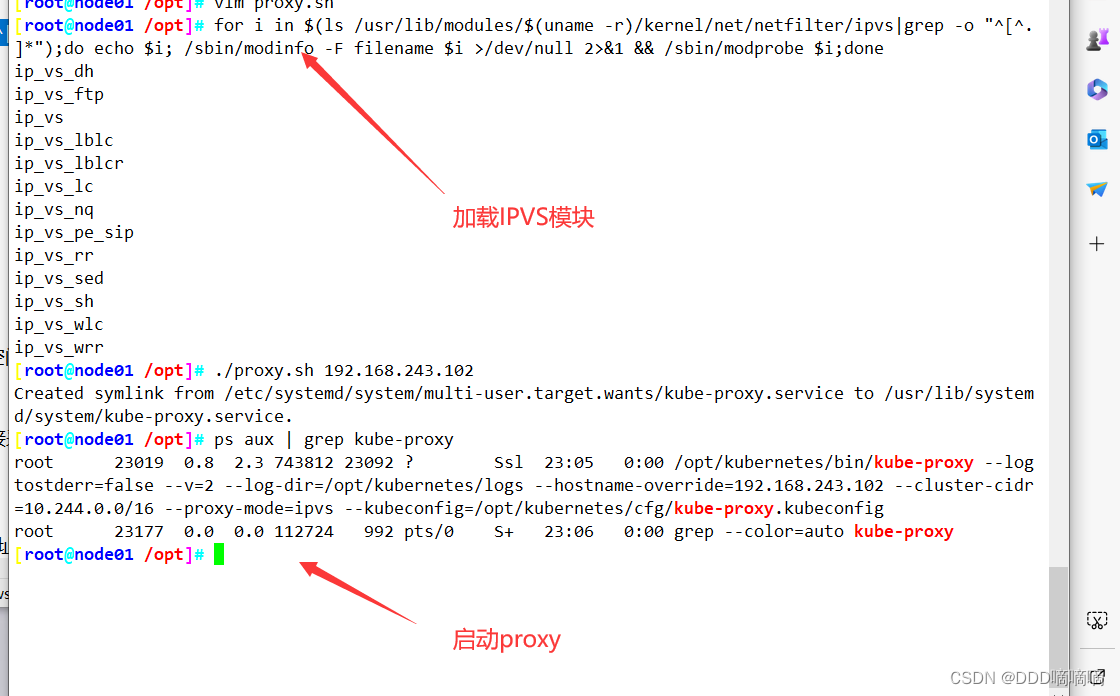
在 node01 节点上操作
#加载 ip_vs 模块
for i in $(ls /usr/lib/modules/$(uname -r)/kernel/net/netfilter/ipvs|grep -o "^[^.]*");do echo $i; /sbin/modinfo -F filename $i >/dev/null 2>&1 && /sbin/modprobe $i;done#启动proxy服务
cd /opt/
./proxy.sh 192.168.80.11
ps aux | grep kube-proxy