百度推广 网站吸引力动漫采集WordPress
目录
- 柱状图与条形图
- 折线图
- 饼图
- 漏斗图
- 雷达图
- 瀑布图及甘特图
- 旭日图
- 组合图
- excel图表:柱状数据条、excel热力图、mini图
可视化工具的表现形式:看板、可视化大屏、驾驶舱
柱状图与条形图
条形图是柱状图的转置
类别:
- 单一柱状图:反映单一类别数据对比,或时序数据趋势
- 并列柱状图:展示两类及以上数据的对比,也可展示随时间的变化趋势
- 堆叠柱状图(不建议分类超过5类,超过时选择最重要的类,其他归为“其他”)
1.普通堆积柱状图:展示数据的内部结构分布
2.百分比堆积柱状图:展示数据的内部相对分布
折线图
指标在连续时间间隔上的变化
类别:
1.折线图
2. 点线图
3. 曲线图
4. 面积图
1,普通堆积面积图:反映整体和整体中各部分随时间的变化趋势
2,百分比堆积面积图:反映整体中各部分随时间的占比变化趋势
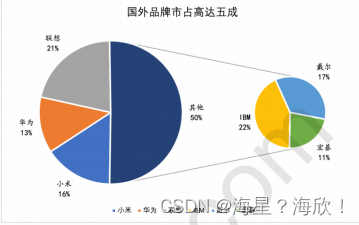
饼图
饼图、环形图、二维饼图
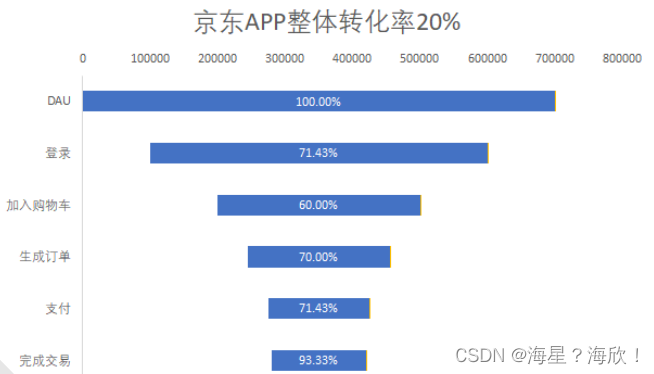
漏斗图
用梯形面积标识某环节业务量与上一个环节之间的差异
雷达图
将多个维度的数据映射到不同的坐标轴上。对比一个或者多个主体在不同维度上的特征表现。
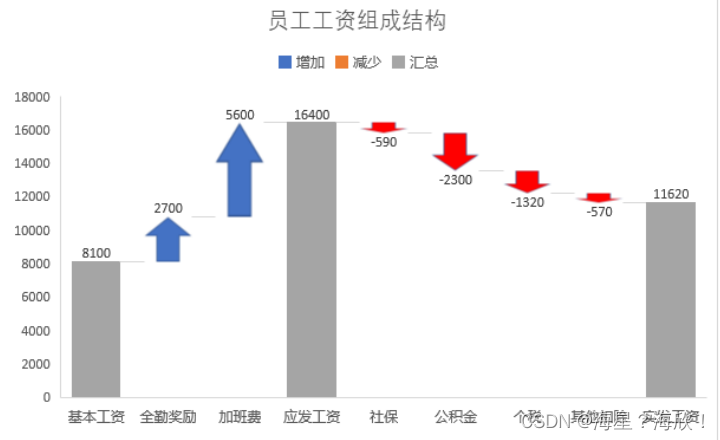
瀑布图及甘特图
依次引入正值或负值的累积效应变化后的结果表现。用于展示汇总数据内部的结构变化
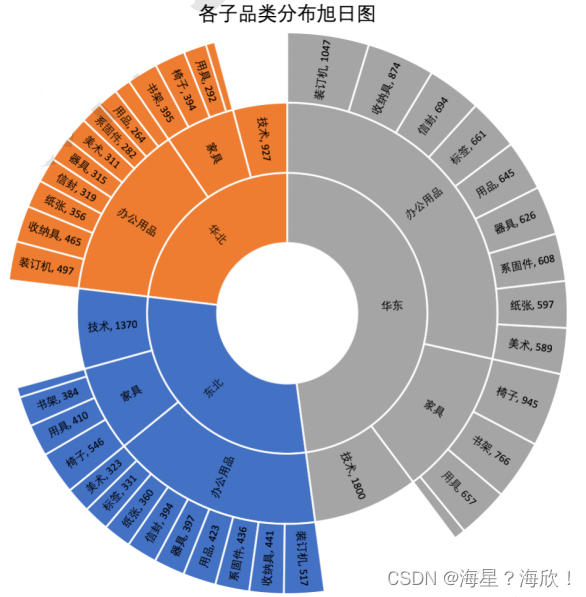
旭日图
展现层级的归属关系,以父子层次结构来显示数据构成情况,又能表现各层级中各部分的占比情况
树状图:采用矩形表示层次结构力的节点,父子节点之间的层次关系用矩形之间的相互嵌套隐喻来表达
组合图
把多种可视化图形展示在一张图表上