福州最好的网站建设网络公司如何制作自己的网站链接视频
1 git多分支
2 git远程仓库
2.1 普通开发者,使用流程
3 ssh方式连接远程仓库
4 协同开发
4.1 避免冲突
4.2 协同开发
5 解决协同冲突
5.1 多人在同一分支开发
5.2 合并分支
1 git多分支
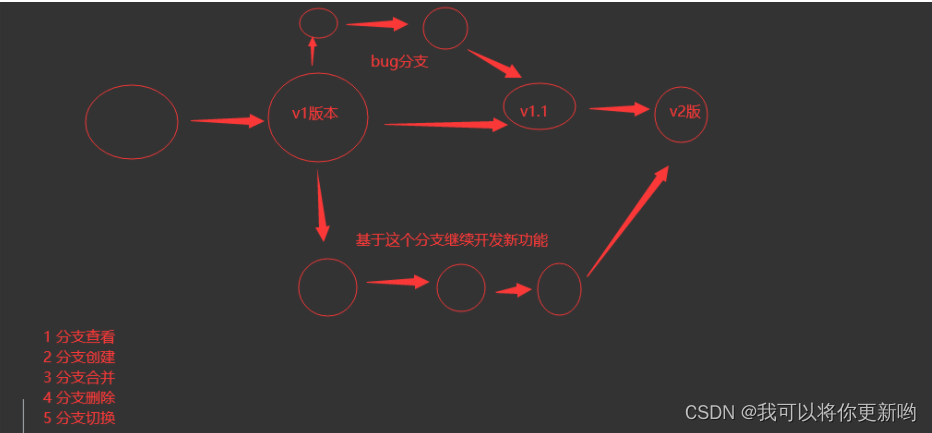
## 命令操作分支-1 创建分支git branch dev-2 查看分支git branch-3 分支合并(可能经常用)git merge dev # 需要在master分支上,合并dev-4 删除分支git branch -d 分支名 # 不能在当前分支上,删除当前分支-5 分支切换git checkout 分支名
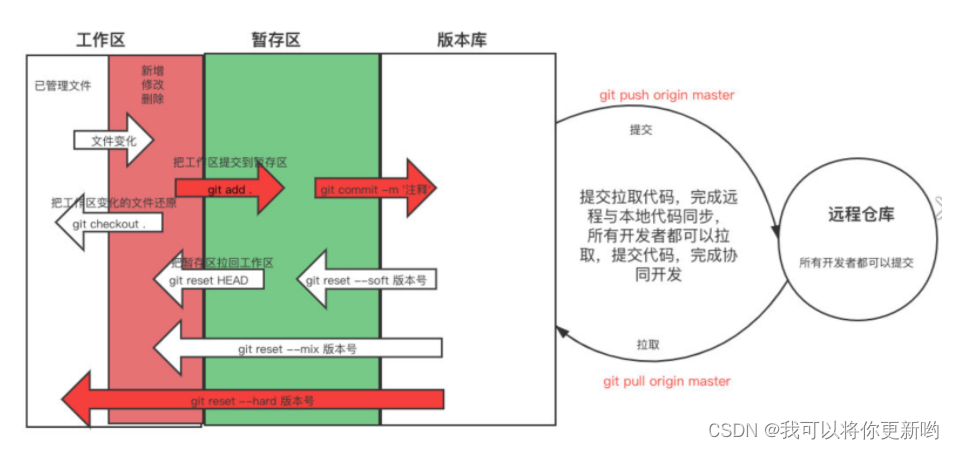
2 git远程仓库
# github gitlab gitee
# 远程仓库以:gitee 为例,目标:把luffy_api提交到远程仓库----远程仓库是空的情况- 1 在gitee上创建了仓库 (确保仓库是空的)- 2 本地:git init- 3 本地:git commit -m 提交版本- 4 指定远程仓库地址# 添加一个远程仓库,名字叫origin 地址是 后面地址-git remote add origin https://gitee.com/liuqingzheng/luffy_api.git-5 推送到远端git push origin master# 弹出:让你输入用户名和密码---》gitee的用户名密码# 远程仓库有东西的情况1 本地先不做仓库---》.git 删除2 找个位置,把远程仓库内容下载git clone https://gitee.com/liuqingzheng/luffy_api.git3 把我们写好的代码,复制到这个文件夹下4 提交到本地仓库git add . git commit -m5 推送到远程仓库git push origin master# 本地还没开始写代码,远端建仓库(有东西)-把远端仓库下载下来,用pycharm打开,写代码--本地提交--提交到远程# 现在公司里有个项目了,写了很多代码了,也用版本管理了-远程仓库一定是空-本地的不要删---》直接提交到远程---》远程也有之前的版本管理# 在公司里,这些都不用你做,创建仓库,提交初始化的代码都是领导做好了-你只需要从远程仓库,下载代码:git clone-用pycharm打开,继续写--提交即可
2.1 普通开发者,使用流程
# 1 领导会把你的账户添加为开发者
# 2 下载代码到本地--》在这个基础上开发-方式一命令:git clone https://gitee.com/vip-linjun/luffy_api.git-方式二:使用pycharm下载-先配置git-方式三:下载zip,下载后使用pycharm打开
# 3 使用pycharm打开-写代码,提交到本地仓库-提交到远程仓库

3 ssh方式连接远程仓库
# 之前,提交,拉取代码 都是走的https协议# 公司内部,一般会走 ssh协议,以后不需要用户名密码了,只需要ssh的公钥和私钥-非对称加密# 操作步骤- 1 生成公钥私钥ssh-keygen -t ed25519 -C "xxx@qq.com" -2 用户家路径,生成的公钥和私钥-C:\Users\Administrator\.ssh-3 复制你的公钥,配置在gitee上-设置---》添加ssh公钥,把公钥粘贴,确定-4 以后,再操作git,不需要用户名密码了(走的是公钥和私钥)---》只针对于你这台机器-5 把远程仓库的连接,修改成ssh协议# 把原来的remote的对应关系删除git remote remove origin# 新增一个对应关系,协议是sshgit remote add origin git@gitee.com:vip-linjun/luffy_api.git-6 以后本地改了代码,提交到本地版本库,想推送到远程仓库,直接 git push即可,不需要再输入用户名密了# 总结:你们到公司后,使用git流程1 注册个账户---》gitlab---》(有可能右同时给你注册了,密码得改)2 领导会把你加成开发者3 进入到你的家里,你就能看到这个项目了4 项目clone到本地-https方式:git clone https://gitee.com/vip-linjun/luffy_api.git-ssh方式:git clone git@gitee.com:vip-linjun/luffy_api.git5 在本地生成公钥私钥,把公钥配置在gitlab6 以后,在pycharm中打开项目写功能,提交到本地,提交到远端即可4 协同开发
4.1 避免冲突
假设:
张三:改了 settings.py 第一行,提交了李四:改了 settings.py 第二行,提交了你也在改setting.py ,没有拉取代码,不知道他们提交了,动了第二行,但是跟李四代码不一样
你要提交,必须先拉取,一拉,把张三的,李四的都会加到你代码中,就会出冲突#### 如果你想避免冲突,勤拉取代码
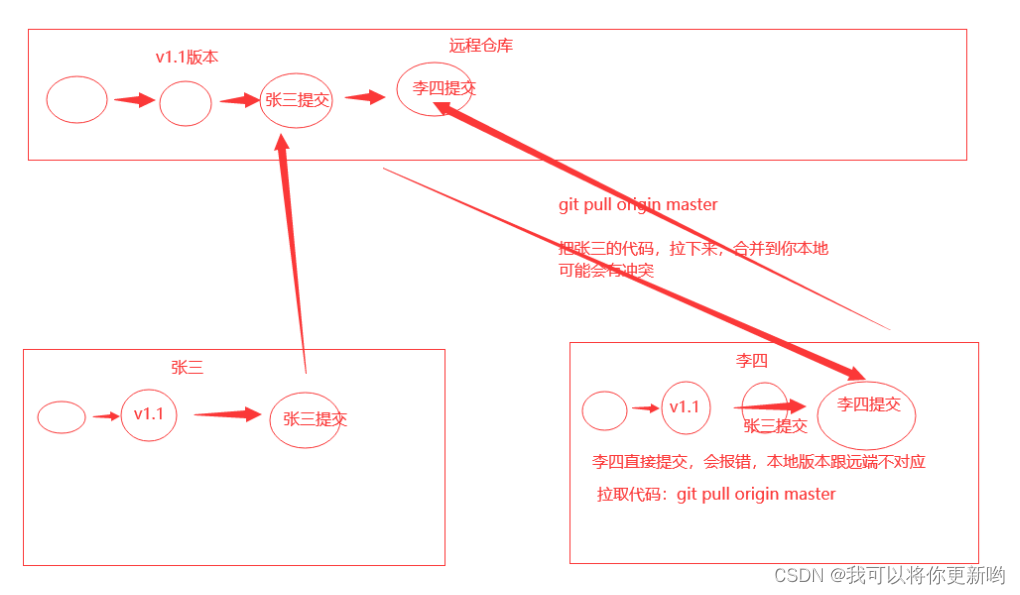
4.2 协同开发
# 同学一:git clone 项目pycharm打开写代码:__init__.pygit add . # 当前目录下有个venv文件夹--》删除这个文件夹git commit -m 'ss' # 设置用户名和邮箱git push origin master # 推不上去 git pull origin master# 同学二在pycharm中改代码改的不是同一个文件git add .git commit -m 'sasdfasd'git pull origin master # 由于我们改了不是同一个文件,不会冲突git push origin master # 把自己的推上去即可5 冲突解决
5.1 多人在同一分支开发
# 同学一:git clone 项目pycharm打开写代码:__init__.py ,第五行,改成 print('阿斯顿发送到发')git add . # 当前目录下有个venv文件夹--》删除这个文件夹git commit -m 'ss' # 设置用户名和邮箱git push origin master # 推不上去 git pull origin master# 同学二在pycharm中改代码改的是同一个文件,不同行 print('aaa')git add .git commit -m 'sasdfasd'git pull origin master # 由于我们改了是同一个文件,会冲突<<<<<<< HEAD # 下面是我的代码print('asdfasdfads')======= # 下面是别人代码print('tang')>>>>>>> 2174bd1a466536dda553ba3835cfd9768ae32be0 # 别人代码的版本号删除报错,看代码,如果改的一样,就留别人的,把自己的代码删除git add .git commit -mgit push origin master5.2 合并分支
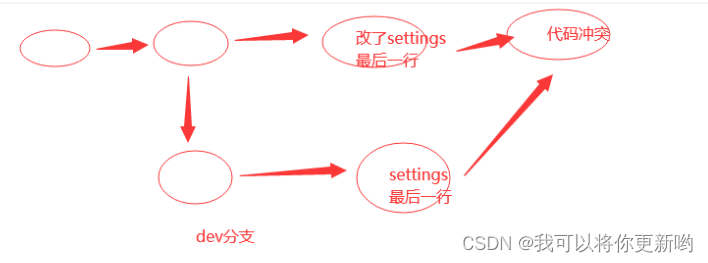
# 操作步骤git branch dev# 在dev分支操作git checkout dev在settings.py最后写代码git add.git commit -m 'dev加代码'# 在master分支操作git checkout master在settings.py最后写代码git add.git commit -m 'master加代码'# 合并分支出冲突git merge dev # 出冲突了,解决冲突,再提交git add .git commit -m