广告毕业设计作品网站页面设计好吗
很多网友安装了VMWare虚拟机,但是在虚拟机上网问题上却卡住了。要想虚拟机上网,首先让我们了解一下VMWare虚拟机三种工作模式。现在,让我们一起走近VMWare的三种工作模式。
理解三种工作模式
VMWare提供了三种工作模式,它们是bridged(桥接模式)、NAT(网络地址转换模式)和host-only(主机模式)。要想在网络管理和维护中合理应用它们,你就应该先了解一下这三种工作模式。
1.bridged(桥接模式)
在这种模式下,VMWare虚拟出来的操作系统就像是局域网中的一台独立的主机,它可以访问网内任何一台机器。在桥接模式下,你需要手工为虚拟系统配置IP地址、子网掩码,而且还要和宿主机器处于同一网段,这样虚拟系统才能和宿主机器进行通信。同时,由于这个虚拟系统是局域网中的一个独立的主机系统,那么就可以手工配置它的TCP/IP配置信息,以实现通过局域网的网关或路由器访问互联网。
使用桥接模式的虚拟系统和宿主机器的关系,就像连接在同一个Hub上的两台电脑。想让它们相互通讯,你就需要为虚拟系统配置IP地址和子网掩码,否则就无法通信。
如果是你是局域网上网方式,虚拟机使用网桥连接方式,只要设置虚拟机的IP地址与本机是同一网段,子网、网关、DNS与本机相同就能实现上网,也能访问局域网络。
如果你是拨号上网方式,虚拟机使用此种方式连接,就要在虚拟机内系统建立宽带连接、拨号上网,但是和 宿主机不能同时上网。
2.NAT(网络地址转换模式)
使用NAT模式,就是让虚拟系统借助NAT(网络地址转换)功能,通过宿主机器所在的网络来访问公网。也就是说,使用NAT模式可以实现在虚拟系统里访问互联网。NAT模式下的虚拟系统的TCP/IP配置信息是由VMnet8(NAT)虚拟网络的DHCP服务器提供的,无法进行手工修改,因此使用NAT模式虚拟系统也就无法和本地局域网中的其他真实主机进行通讯。
采用NAT模式最大的优势是虚拟系统接入互联网非常简单,你不需要进行任何其他的配置,只需要宿主机器能访问互联网,虚拟机就能访问互联网。
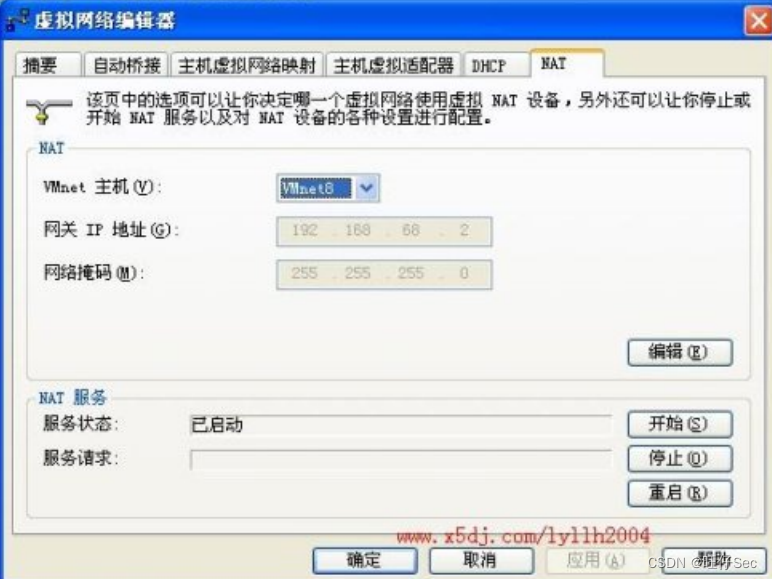
设置上网方式:本机网上邻居属性-->VMnet8属性-->TCP/IP属性-->常规与备用配置都设定为自动获取,虚拟机网上邻居TCP/IP都设定为自动,虚拟网络设置设定如下面图所示
详细步骤:
1.把你的虚拟网卡VMnet8设置为自动获得IP、自动获得DNS 服务器,启用。
如果你想利用VMWare安装一个新的虚拟系统,在虚拟系统中不用进行任何手工配置就能直接访问互联网,建议你采用NAT模式。
注释:以上所提到的NAT模式下的VMnet8虚拟网络,host-only模式下的VMnet1虚拟网络,以及bridged(桥接)模式下的VMnet0虚拟网络,都是由VMWare虚拟机自动配置而生成的,不需要用户自行设置。VMnet8和VMnet1提供DHCP服务,VMnet0虚拟网络则不提供。
点击VMnet8,再点击开始按钮
点击开始按钮
3.host-only(主机模式)
在某些特殊的网络调试环境中,如何要求将真实环境和虚拟环境隔离开,这时你就可采用host-only模式。在host-only模式中,所有的虚拟系统是可以相互通信的,但虚拟系统和真实的网络是被隔离开的,VMWare虚拟机不能访问互联网。
提示:在host-only模式下,虚拟系统和宿主机器系统是可以相互通信的,相当于这两台机器通过双绞线互连。
在host-only模式下,虚拟系统的TCP/IP配置信息(如IP地址、网关地址、DNS服务器等),都是由VMnet1(host-only)虚拟网络的DHCP服务器来动态分配的。
如果你想利用VMWare创建一个与网内其他机器相隔离的虚拟系统,进行某些特殊的网络调试工作,可以选择host-only模式。
配置虚拟系统工作模式
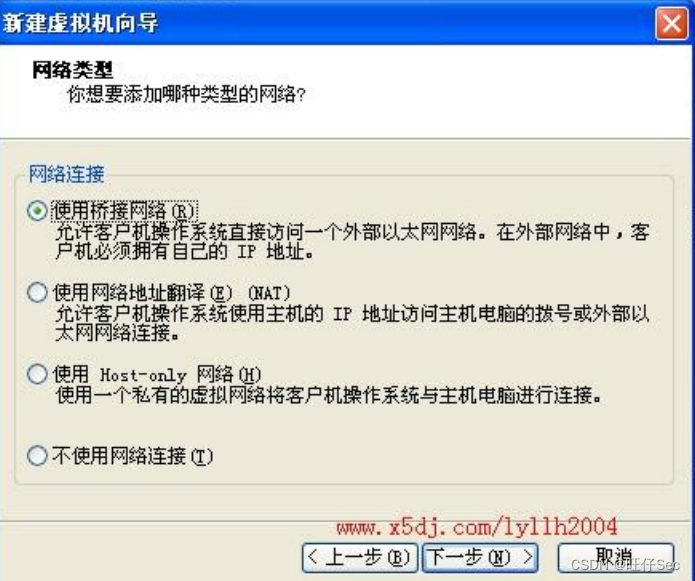
在实际的工作中,由于用户的需求不同、调试环境的要求不同,不同的用户需要选择不同的工作模式,也许是bridged(桥接)模式,也可能是NAT模式或host-only模式。不管选择使用何种工作模式,将虚拟系统配置成相应的工作模式是非常简单的,在“新建虚拟机向导”对话框中就可以完成。
在“新建虚拟机向导”对话框中一路点击“下一步”按钮,进入“网络类型”对话框后,就可以选择你所使用的工作模式。在“网络类型”对话框中有四个单选项,分别为bridged(桥接)模式、NAT模式、host-only模式、不使用网络连接,选择你需要使用的工作模式后,点击“下一步”按钮,就可完成虚拟系统工作模式的配置。
注意:1.要确保VMware Network Adapter for VMnet8 处于启用状态,这个是NAT网络模式要用的虚拟网卡。注意这个网卡的IP地址,不需要做手动设置,切记!
2.把你虚拟机中操作系统的“本地连接”也设置为自动获得IP、自动获得DNS服务器(在虚拟机中,右键“本地连接”-双击“Internet协议”,看看是不是自动的吧!固定IP的也在这里改!)
3.当然是将虚拟机的上网方式选为NAT 。
在虚拟机里安装好操作系统,启动虚拟系统,打开IE浏览器,这时候正常的话虚拟机就可以上网了,切记!!虚拟系统中的网卡也不需要做任何设置。
右键你要设置的虚拟机选“设置”(因为有的不止虚拟一台),在“硬件”中选“以太网”,将右边的网络连接改为NAT -确定。
4.点菜单栏里的“编辑”-选“虚拟网络设置”,先将“自动桥接”给去掉(去掉钩钩),再选“DHCP”开启DHCP服务,点“开始”-应用,再按同样的方法开启“NAT ”的功能。
5.最重要的是你的两个服务必须开启:VMware DHCP Service 和VMware NATService. 具体操作如下:开始——设置——控制面板——管理工具——服务,确保 VMwareDHCP Service和VMware NAT Service服务已经启动。
关于虚拟机使用NAT不能上网的若干问题
许多朋友,在使用VMware Workstation的时候,创建的虚拟机使用NAT,但在虚拟机中却不能上网,原因可能如下:
1、主机是Windows XP Professional SP2或者是Windows Server2003 SP1,如果是这样,则需要把VMnet1、VMnet8的防火墙关闭。
方法是:右击“本地连接”选择属性→高级→设置,在“Windows防火墙”对话框中单击“高级”,将VMnet1和VMnet8前面的“√”去掉就可以。
2、你的主机安装了瑞星、江民或者天网防火墙,或者其他防火墙软件,这些防火墙软件你没有进行正确的配置,导致VMware不能通过其内置的NAT功能共享上网,这时,可以把第三方的防火墙软件关闭。
3、你可能在VMnet8或者VMnet1启用了XP内置的“Internet连接共享”,你要知道,使用VMware的NAT功能,你不需要在 主机上启用共享,因为VMware已经内置了NAT的共享。如果是这样,请去掉这些共享,然后重新启动VMware 的NAT服务(或者重新启动计算机)
4、可能是你使用了VMware Workstation的“绿色”版或者“精简”版。如果是这样,请使用完整版本安装。如果你需要中文,可以安装中文的汉化补丁。
推荐作法:
主机不安装第三方的防火墙软件,安装VMware Workstation的完整版本(就是从VMware Workstation网站或者一些下载网站下载的VMware Workstation的英文版(VMware-workstation-5.5.3-34685的大小是92.4M),安装汉化补丁,修改XP的防火墙,让VMnet1和VMnet8不使用防火墙(主机网卡使用)。创建虚拟机使用NAT网卡,在虚拟机中设置为“自动获得IP及DNS地址”,这样做,一般情况下都可以直接上网。
关于VMware用NAT与主机共享上网的一般设置
虚拟机的网络连接里的“本地连接”就用“自动获取IP地址”就好,有固定IP的需要到“Internet协议”设置。(右键“本地连接”-双击“Internet 协议”,看看是不是自动的吧!固定IP的也在这里改!)
1.当然是将虚拟机的上网方式选为NAT咯。右键你要设置的虚拟机选“设置”(因为有的不止虚拟一台),在“硬件”中选“以太网”,将右边的网络连接改为NAT-确定。
2.点菜单栏里的“编辑”-选“虚拟网络设置”,先将“自动桥接”给去掉(去掉钩钩),再选“DHCP”开启DHCP服务,点“开始”-应用,再按同样的方法开启“NAT”的功能。
NAT的上网方式的特点
1.主机的虚拟网卡不用设置(默认为自动获得)
2.虚拟系统中的网卡不用设置(默认为自动获得)
这条两个实现的前提是虚拟的dhcp服务器正常工作
第二种方式上网:桥接方式
虚拟机选择“桥接”,桥接之后便可以直接上网了,但是不能和主机共享资料,所以我采用“共享”的方式,使得虚拟机共享主机网卡,从而达到上网和共享主机资料的目的。
在网上邻居----属性---ADSL--属性---高级----Internet连接共享-----把底下的“允许其它计算机......”那项勾上,然后选择底下的选项为“本地连接”--------确定