鞍山网站制作推广led外贸网站
文章目录
- 问题描述
- 先看结果
- 表结构展示
- 实现递归查询集合
- 查询结果
- 修复数据
问题描述
最近开发过程中遇到一个问题,每次添加代理关系都要去递归查询一下它在不在这个代理关系树上.很麻烦也很浪费资源.想着把代理关系的父类全部存起来
先看结果
表结构展示
| 表名(t_agent_user_relation) | ||
| 字段名 | 字段类型 | 描述 |
| current_user_id | int | 当前用户id |
| superior_user_id | int | 代理用户id |
| parent_ids | varchar | 父类Id集合以逗号隔开 |
| parent_id | int | 父类ID |
| id | int | 主键 |
实现递归查询集合
因为没有对应函数,需要自行编写递归查询函数
createdefiner = root@`%` function getParentIds(child_id int) returns varchar(255)
BEGINDECLARE parent_id varchar(255) default '';DECLARE parent_ids VARCHAR(1500) default '';DECLARE count int;DECLARE sum int default 0;-- 获取当前子类的父类IDSELECT superior_user_id INTO parent_id FROM t_agent_user_relation WHERE current_user_id = child_id;-- 递归查询所有父类IDWHILE parent_id is not null && sum < 3DOSET parent_ids = CONCAT_WS(',', parent_ids, parent_id);SELECT count(1) into count FROM t_agent_user_relation WHERE current_user_id = parent_id;if count = 0 thenset parent_id = null;elseSELECT superior_user_id INTO parent_id FROM t_agent_user_relation WHERE current_user_id = parent_id;end if;-- 防止出现死循环if parent_id is not null && find_in_set(parent_id, parent_ids) > 0thenset sum = sum + 1;elseset sum = sum;end if;END WHILE;RETURN parent_ids;
END;如果出现以下错误
[HY000][1418] This function has none of DETERMINISTIC, NO SQL, or READS SQL
执行
set global log_bin_trust_function_creators = 1;错误原因我就不在这里分析了,有兴趣的自己查询一下
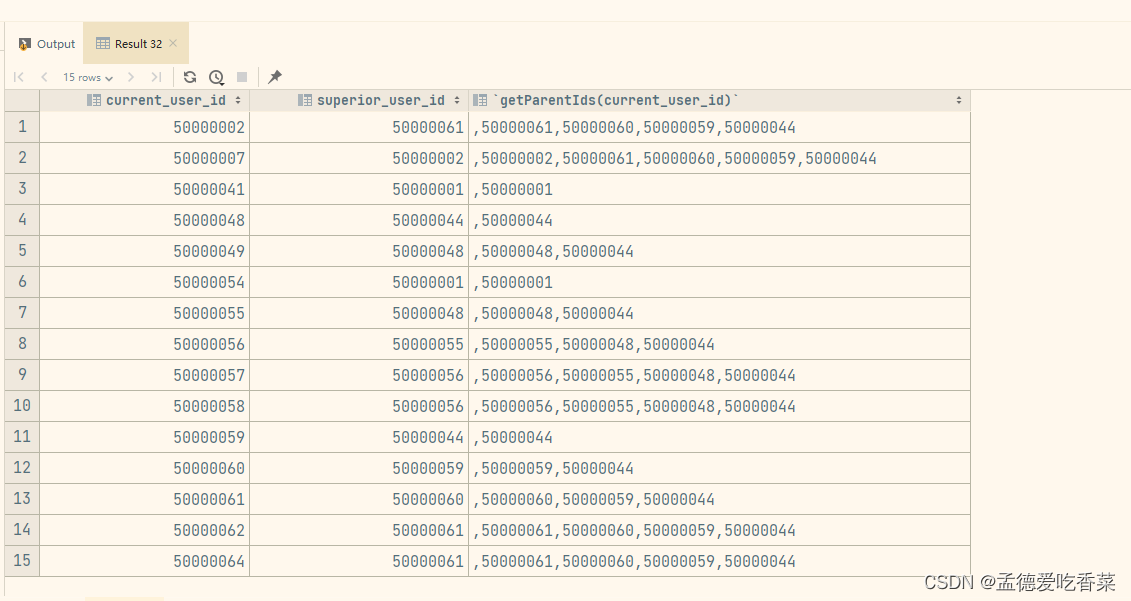
查询结果
select current_user_id,superior_user_id,getParentIds(current_user_id) from t_agent_user_relation

修复数据
update t_agent_user_relation set parent_ids= getParentIds(current_user_id) where parent_ids is null