益阳做网站怎么便宜应用开发用什么软件
1、什么是Reactor模型
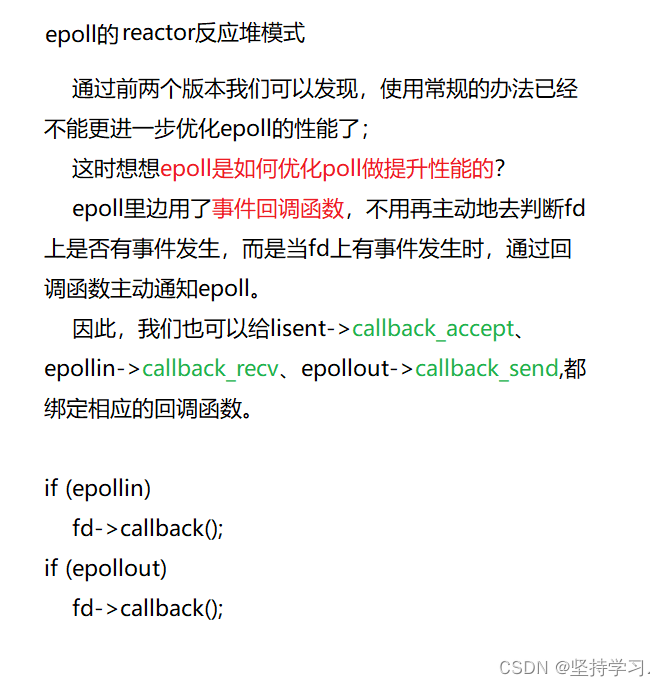
Reactor意思是“反应堆”,是一种事件驱动机制。
和普通函数调用的不同之处在于:应用程序不是主动的调用某个 API 完成处理,而是恰恰相反,Reactor逆置了事件处理流程,应用程序需要提供相应的接口并注册到 Reactor 上,如果相应的时间发生,Reactor将主动调用应用程序注册的接口,这些接口又称为“回调函数”。
对于刚开始接触这个机制,个人感觉翻译成“感应器”可能会更好理解一点,因为注册在Reactor上的函数就像感应器一样,只要有事件到达,就会触发它开始工作。
Reactor 模式是编写高性能网络服务器的必备技术之一。
2、Reactor模型的优点
- 响应快,不必为单个同步时间所阻塞,虽然 Reactor 本身依然是同步的;
- 编程相对简单,可以最大程度的避免复杂的多线程及同步问题,并且避免了多线程/进程的切换开销;
- 可扩展性强,可以方便的通过增加 Reactor 实例个数来充分利用 CPU 资源;
- 可复用性高,reactor 框架本身与具体事件处理逻辑无关,具有很高的复用性; Reactor 模型开发效率上比起直接使用 IO 复用要高,它通常是单线程的,设计目标是希望单线程使用一颗 CPU 的全部资源。优点即每个事件处理中很多时候可以不考虑共享资源的互斥访问。可是缺点也是明显的,现在的硬件发展,已经不再遵循摩尔定律,CPU 的频率受制于材料的限制不再有大的提升,而改为是从核数的增加上提升能力,当程序需要使用多核资源时,Reactor 模型就会悲剧 , 为什么呢?如果程序业务很简单,例如只是简单的访问一些提供了并发访问的服务,就可以直接开启多个反应堆,每个反应堆对应一颗 CPU 核心,这些反应堆上跑的请求互不相关,这是完全可以利用多核的。例如 Nginx 这样的 http 静态服务器。
3、通过对网络编程(epoll)代码的优化,深入理解Reactor模型
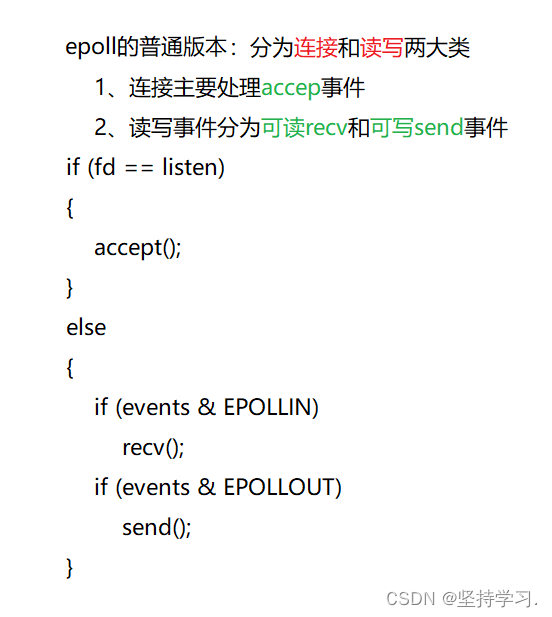
1、epoll的普通版本,根据fd类型(listen_fd和client_fd)分为两大类处理。
如果是listen_fd,调用accept处理连接请求;
如果是client_fd,调用recv或者send处理数据。
代码实现:
#include <stdio.h>
#include <string.h>
#include <stdlib.h>#include <unistd.h>
#include <netinet/tcp.h>
#include <arpa/inet.h>
#include <sys/epoll.h>#include <errno.h>int main(int argc, char* argv[])
{if (argc < 2)return -1;int port = atoi(argv[1]); //字符串转换为整型int sockfd = socket(AF_INET, SOCK_STREAM, 0);if (sockfd < 0)return -1;struct sockaddr_in addr;memset(&addr, 0, sizeof(struct sockaddr_in)); //新申请的空间一定要置零addr.sin_family = AF_INET;addr.sin_port = htons(port); //转换成网络字节序addr.sin_addr.s_addr = INADDR_ANY;if (bind(sockfd, (struct sockaddr*)&addr, sizeof(struct sockaddr_in)) < 0)return -2;if (listen(sockfd, 5) < 0)return -3;//epollint epfd = epoll_create(1); //创建epoll,相当于红黑树的根节点struct epoll_event ev, events[1024] = {0}; //events相当于就绪队列,一次性可以处理的集合ev.events = EPOLLIN;ev.data.fd = sockfd;epoll_ctl(epfd, EPOLL_CTL_ADD, sockfd, &ev); //将ev节点加入到epoll,此处的sockfd参数随便添加没有意义,需要操作系统索引和它有对应的句柄while (1){int nready = epoll_wait(epfd, events, 1024, -1); //第四个参数-1表示一直等待,有事件才返回if (nready < 1) //没有事件触发,nready代表触发事件的个数break;int i = 0;for (i = 0; i < nready; i++) //epoll_wait带出的就绪fd包括两大类:1、处理连接的listen_fd,2、处理数据的send和recv{if (events[i].data.fd == sockfd) //如果是listenfd,就将它加入到epoll{struct sockaddr_in client_addr;memset(&client_addr, 0, sizeof(struct sockaddr_in));socklen_t client_len = sizeof(client_addr);int client_fd = accept(sockfd, (struct sockaddr *)&client_addr, &client_len);if (client_fd <= 0)continue;char str[INET_ADDRSTRLEN] = {0};printf("recv from IP = %s ,at Port= %d\n", inet_ntop(AF_INET, &client_addr.sin_addr, str, sizeof(str)), ntohs(client_addr.sin_port));ev.events = EPOLLIN | EPOLLET; //epoll默认是LT模式ev.data.fd = client_fd;epoll_ctl(epfd, EPOLL_CTL_ADD, client_fd, &ev);}else //fd进行读写操作{//对fd的读写操作没有分开int client_fd = events[i].data.fd;char buf[1024] = {0};int ret = recv(client_fd, buf, 1024, 0);if (ret < 0){if (errno == EAGAIN || errno == EWOULDBLOCK){//}else{//}printf("ret < 0,断开连接:%d\n", client_fd);close(client_fd);ev.events = EPOLLIN;ev.data.fd = client_fd;epoll_ctl(epfd, EPOLL_CTL_DEL, client_fd, &ev);}else if (ret == 0) //接收到了客户端发来的断开连接请求FIN后,没有及时调用close函数,进入了CLOSE _WAIT状态{printf("ret = 0,断开连接:%d\n", client_fd);close(client_fd);ev.events = EPOLLIN;ev.data.fd = client_fd;epoll_ctl(epfd, EPOLL_CTL_DEL, client_fd, &ev); //close关闭连接后要将它既是从epoll中删除}else{printf("Recv: %s, %d Bytes\n", buf, ret);}//区分fd的读写操作,即recv和sendif (events[i].events & EPOLLIN){int client_fd = events[i].data.fd;char buf[1024] = {0};int ret = recv(client_fd, buf, 1024, 0);if (ret < 0){if (errno == EAGAIN || errno == EWOULDBLOCK){//...}else{//...}printf("ret < 0,断开连接:%d\n", client_fd);close(client_fd);ev.events = EPOLLIN;ev.data.fd = client_fd;epoll_ctl(epfd, EPOLL_CTL_DEL, client_fd, &ev);}else if (ret == 0) //接收到了客户端发来的断开连接请求FIN后,没有及时调用close函数,进入了CLOSE _WAIT状态{printf("ret = 0,断开连接:%d\n", client_fd);close(client_fd);ev.events = EPOLLIN;ev.data.fd = client_fd;epoll_ctl(epfd, EPOLL_CTL_DEL, client_fd, &ev); //close关闭连接后要将它既是从epoll中删除}else{printf("Recv: %s, %d Bytes\n", buf, ret);}}if (events[i].events & EPOLLOUT) //为什么需要判断EPOLLOUT,而不是直接else?因为一个fd有可能同时存在可读和可写事件的{int client_fd = events[i].data.fd;char buf[1024] = {0};send(client_fd, buf, sizeof(buf), 0);}}}}return 0;
}
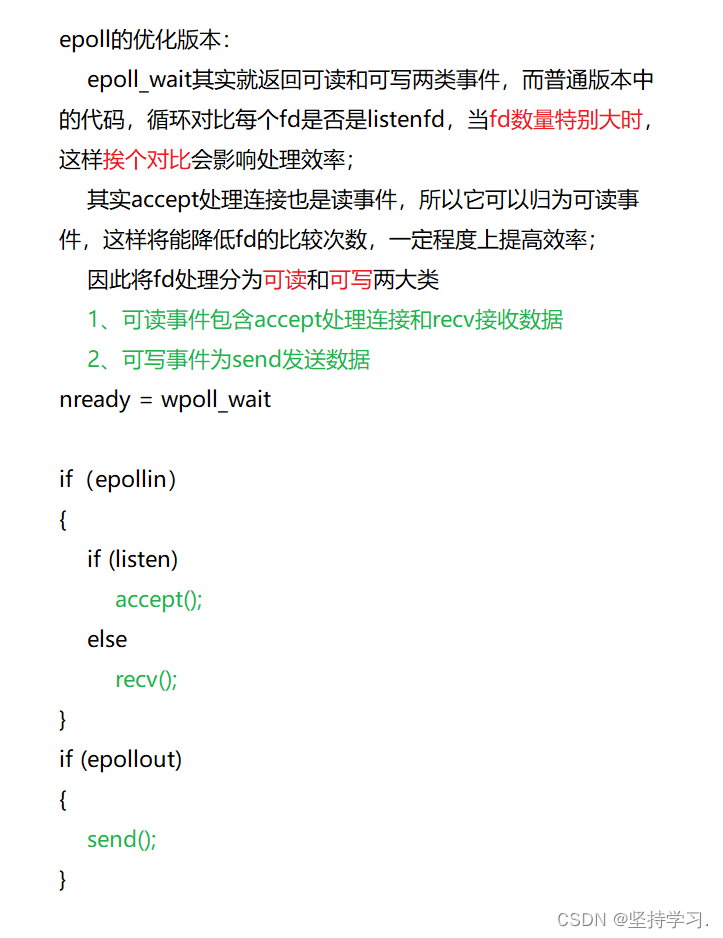
2、epoll的优化版本,根据事件类型(读和写)分为两大类处理。
代码实现:
for (i = 0; i < nready; i++) //epoll_wait带出的就绪fd包括两大类:1、处理连接的listen_fd,2、处理数据的send和recv{//区分fd的读写操作if (events[i].events & EPOLLIN){if (events[i].data.fd == sockfd) //如果是listenfd,就将它加入到epoll{struct sockaddr_in client_addr;memset(&client_addr, 0, sizeof(struct sockaddr_in));socklen_t client_len = sizeof(client_addr);int client_fd = accept(sockfd, (struct sockaddr *)&client_addr, &client_len);if (client_fd <= 0)continue;char str[INET_ADDRSTRLEN] = {0};printf("recv from IP = %s ,at Port= %d\n", inet_ntop(AF_INET, &client_addr.sin_addr, str, sizeof(str)), ntohs(client_addr.sin_port));ev.events = EPOLLIN | EPOLLET; //epoll默认是LT模式ev.data.fd = client_fd;epoll_ctl(epfd, EPOLL_CTL_ADD, client_fd, &ev);}else {int client_fd = events[i].data.fd;char buf[1024] = {0};int ret = recv(client_fd, buf, 1024, 0);if (ret < 0){if (errno == EAGAIN || errno == EWOULDBLOCK){//...}else{//...}printf("ret < 0,断开连接:%d\n", client_fd);close(client_fd);ev.events = EPOLLIN;ev.data.fd = client_fd;epoll_ctl(epfd, EPOLL_CTL_DEL, client_fd, &ev);}else if (ret == 0) //接收到了客户端发来的断开连接请求FIN后,没有及时调用close函数,进入了CLOSE _WAIT状态{printf("ret = 0,断开连接:%d\n", client_fd);close(client_fd);ev.events = EPOLLIN;ev.data.fd = client_fd;epoll_ctl(epfd, EPOLL_CTL_DEL, client_fd, &ev); //close关闭连接后要将它既是从epoll中删除}else{printf("Recv: %s, %d Bytes\n", buf, ret);}}}//为什么需要判断EPOLLOUT,而不是直接else?因为一个fd有可能同时存在可读和可写事件的if (events[i].events & EPOLLOUT) {int client_fd = events[i].data.fd;char buf[1024] = {0};send(client_fd, buf, sizeof(buf), 0);}}
3、epoll的Reactor模式, epoll由以前的对网络io(fd)进行管理,转变成对events事件进行管理。
代码实现:
#include <stdio.h>
#include <string.h>
#include <stdlib.h>#include <unistd.h>
#include <netinet/tcp.h>
#include <arpa/inet.h>
#include <sys/epoll.h>#include <errno.h>//每个fd所对应的信息
struct sockitem
{int sockfd;int (*callback)(int fd, int events, void*arg);char sendbuf[1024];char recvbuf[1024];
};//每个epoll所对应的信息
struct epollitem
{int epfd;struct epoll_event events[1024]; //events相当于就绪队列,一次性可以处理的集合
};struct epollitem *eventloop = NULL;int recv_cb(int fd, int events, void*arg);
int send_cb(int fd, int events, void*arg);int accept_cb(int fd, int events, void*arg)
{printf("---accept_cb(int fd, int events, void*arg)---\n");struct sockaddr_in client_addr;memset(&client_addr, 0, sizeof(struct sockaddr_in));socklen_t client_len = sizeof(client_addr);int client_fd = accept(fd, (struct sockaddr *)&client_addr, &client_len);if (client_fd <= 0)return -1;char str[INET_ADDRSTRLEN] = {0};printf("recv from IP = %s ,at Port= %d\n", inet_ntop(AF_INET, &client_addr.sin_addr, str, sizeof(str)), ntohs(client_addr.sin_port));struct epoll_event ev;ev.events = EPOLLIN | EPOLLET; //epoll默认是LT模式struct sockitem *si = (struct sockitem*)malloc(sizeof(struct sockitem));si->sockfd = client_fd;si->callback = recv_cb;ev.data.ptr = si;epoll_ctl(eventloop->epfd, EPOLL_CTL_ADD, client_fd, &ev);return client_fd;
}int recv_cb(int fd, int events, void*arg)
{printf("---recv_cb(int fd, int events, void*arg)---\n");struct epoll_event ev;struct sockitem *sit = (struct sockitem*)arg;int ret = recv(fd, sit->recvbuf, 1024, 0);if (ret < 0){if (errno == EAGAIN || errno == EWOULDBLOCK){//...}else{//...}printf("ret < 0,断开连接:%d\n", fd);ev.events = EPOLLIN;epoll_ctl(eventloop->epfd, EPOLL_CTL_DEL, fd, &ev); //close关闭连接后要将它既是从epoll中删除close(fd);free(sit); //连接关闭后释放内存}else if (ret == 0) //接收到了客户端发来的断开连接请求FIN后,没有及时调用close函数,进入了CLOSE _WAIT状态{printf("ret = 0,断开连接:%d\n", fd);ev.events = EPOLLIN;epoll_ctl(eventloop->epfd, EPOLL_CTL_DEL, fd, &ev); close(fd);free(sit);}else{printf("Recv from recvbuf: %s, %d Bytes\n", sit->recvbuf, ret);ev.events = EPOLLIN | EPOLLOUT; //sit->sockfd = fd;sit->callback = send_cb;ev.data.ptr = sit;epoll_ctl(eventloop->epfd, EPOLL_CTL_MOD, fd, &ev);}return ret;
}int send_cb(int fd, int events, void*arg)
{struct epoll_event ev;struct sockitem *sit = (struct sockitem*)arg;strncpy(sit->sendbuf, sit->recvbuf, sizeof(sit->recvbuf) + 1);send(fd, sit->sendbuf, sizeof(sit->recvbuf) + 1, 0);ev.events = EPOLLIN | EPOLLET; //sit->sockfd = fd;sit->callback = recv_cb;ev.data.ptr = sit;epoll_ctl(eventloop->epfd, EPOLL_CTL_MOD, fd, &ev);return fd;
}int main(int argc, char* argv[])
{if (argc < 2)return -1;int port = atoi(argv[1]); //字符串转换为整型int sockfd = socket(AF_INET, SOCK_STREAM, 0);if (sockfd < 0)return -1;struct sockaddr_in addr;memset(&addr, 0, sizeof(struct sockaddr_in)); //新申请的空间一定要置零addr.sin_family = AF_INET;addr.sin_port = htons(port); //转换成网络字节序addr.sin_addr.s_addr = INADDR_ANY;if (bind(sockfd, (struct sockaddr*)&addr, sizeof(struct sockaddr_in)) < 0)return -2;if (listen(sockfd, 5) < 0)return -3;//epolleventloop = (struct epollitem *)malloc(sizeof(struct epollitem));eventloop->epfd = epoll_create(1); //创建epoll,相当于红黑树的根节点struct epoll_event ev;ev.events = EPOLLIN | EPOLLET;struct sockitem *si = (struct sockitem*)malloc(sizeof(struct sockitem));si->sockfd = sockfd;si->callback = accept_cb;ev.data.ptr = si; //将fd和对应的回调函数绑定一起带进epollepoll_ctl(eventloop->epfd, EPOLL_CTL_ADD, sockfd, &ev); //将ev节点加入到epoll,此处的sockfd参数随便添加没有意义,需要操作系统索引和它有对应的句柄while (1){int nready = epoll_wait(eventloop->epfd, eventloop->events, 1024, -1); //第四个参数-1表示一直等待,有事件才返回if (nready < 1) //没有事件触发,nready代表触发事件的个数break;int i = 0;for (i = 0; i < nready; i++){//区分fd的读写操作if (eventloop->events[i].events & EPOLLIN){struct sockitem *sit = (struct sockitem*)eventloop->events[i].data.ptr;sit->callback(sit->sockfd, eventloop->events[i].events, sit); //不用区分listen_fd和recv_fd,相应的fd都会调用他们所对应的callback}//为什么需要判断EPOLLOUT,而不是直接else?因为一个fd有可能同时存在可读和可写事件的if (eventloop->events[i].events & EPOLLOUT) {struct sockitem *sit = (struct sockitem*)eventloop->events[i].data.ptr;sit->callback(sit->sockfd, eventloop->events[i].events, sit);}}}return 0;
}4、Reactor模型的应用
1、单线程模式的Reactor,参考libevent、redis;
2、多线程模式的Reactor,参考memcached;
3、多进程模式的Reactor,参考nginx。