阿里巴巴网站做销售方案二手车网站的建设
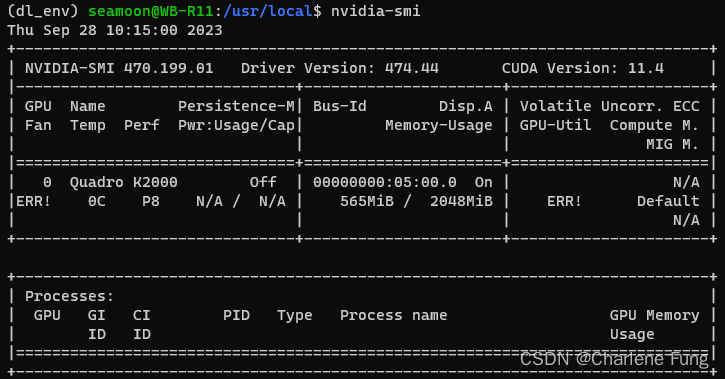
机器配置
GPU: NVIDIA Quadro K2000
与 NVIDIA 驱动程序捆绑的CUDA版本
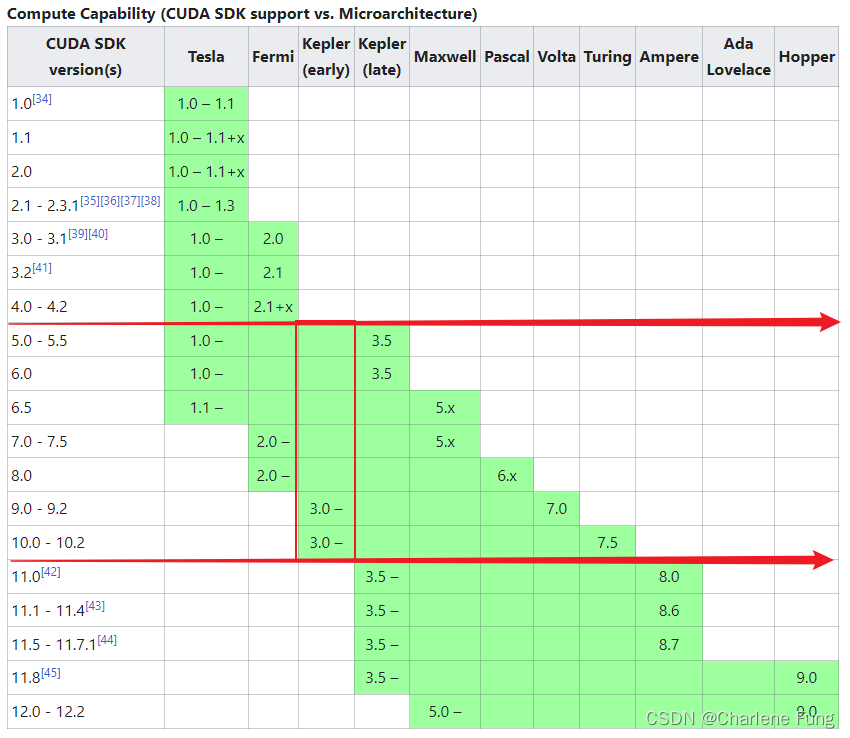
但按照维基百科的描述,我的GPU对应的compute capability=3.0,允许安装的CUDA最高只支持10.2,如下所示。
为什么本地会显示11.4呢?对此,GPT是这么给出解释的。
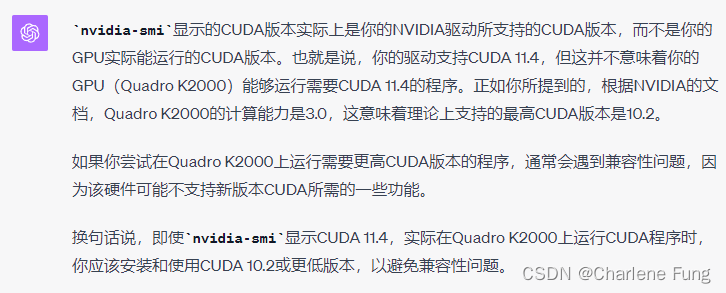
因此,为了满足运行pytorch程序的硬件需求,我最高只能安装CUDA=10.2,按照pytorch官网给出的对应CUDA=10.2的版本,去安装对应的pytorch。首先,我需要在我的ubuntu子系统安装CUDA=10.2。
WSL安装CUDA=10.2
conda创建一个新的环境,指定cuda版本。
# conda在创建新环境时指定CUDA版本
conda create -n myenv python=3.8 cudatoolkit=10.2
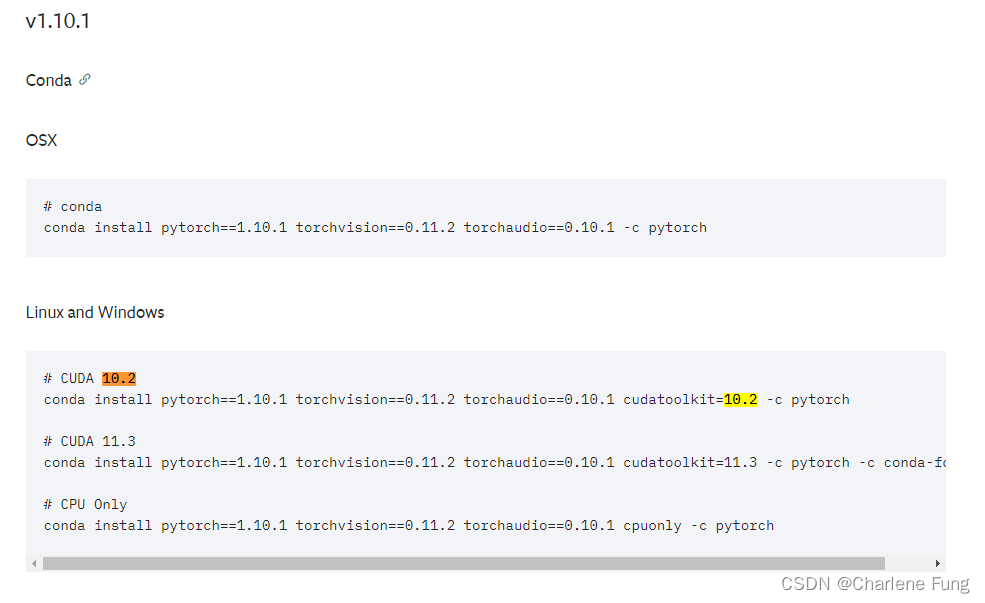
找到对应CUDA=10.2的pytorch
找pytorch的previous versions,定位Conda的CUDA=10.2版本,安装即可。
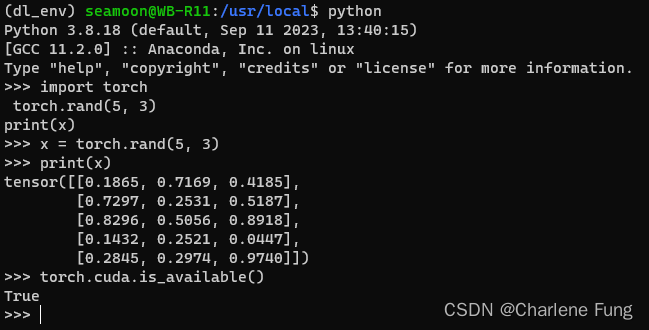
测试CUDA是否可用
参考pytorch官网给出的解答,可以通过以下命令来验证。
# 命令行输入
python# 检验pytorch是否安装成功
import torch
x = torch.rand(5, 3)
print(x)# 检验CUDA 驱动程序是否已启用并可用于PyTorch
import torch
torch.cuda.is_available()
最终输出的结果如下所示,表示已经配置好了。
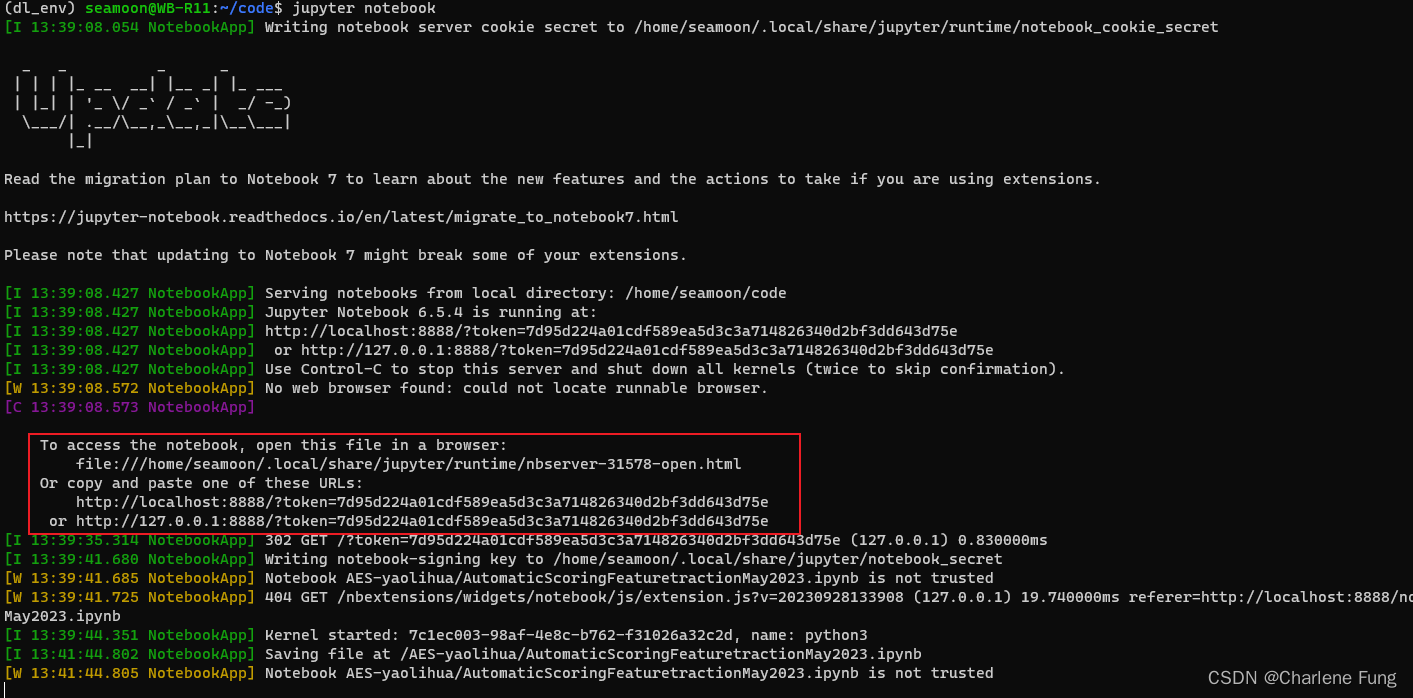
Jupyter notebook安装
# anaconda环境,只需一行命令conda install notebook
安装成功,运行如下所示。copy链接,在浏览器打开即可。
后记
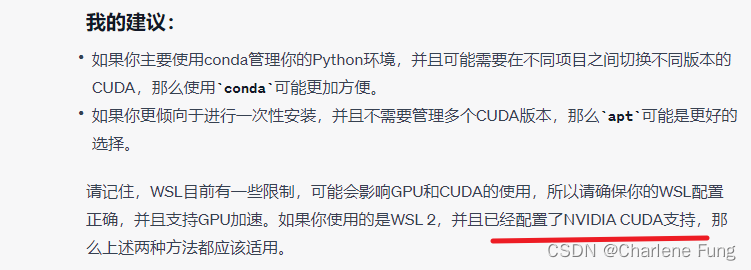
安装过程中的其他问题:
- 在windows WSL上安装CUDA=10.2,我用apt安装呢,还是conda安装比较好?
- 要给WSL2配置CUDA支持,只需到NIVIDIA官网下载并安装对应GPU的最新驱动。
- 确保Anaconda和WSL2已经配置完成,我这里安装的是ubuntu 22.04.2 LTS。
- 注意到我这里WSL安装CUDA=10.2只用了一行命令,和其他教程自己手动到官网下载cuda,cudnn等操作相比,更加精简和不易出错。
- 本文下载资源、用到的命令涉及的所有链接整理:
查询GPU的compute capability
https://en.m.wikipedia.org/wiki/CUDA#GPUs_supported
查询pytorch的历史版本及安装命令
https://pytorch.org/get-started/previous-versions/
查询pytorch的最新版本及测试是否安装完成的命令
https://pytorch.org/get-started/locally/
下载CUDA最新驱动
https://www.nvidia.com/download/index.aspx

感谢ernest大佬的技术支持!