那种导航网站网页代码模板
一、基本数据类型
1.数字
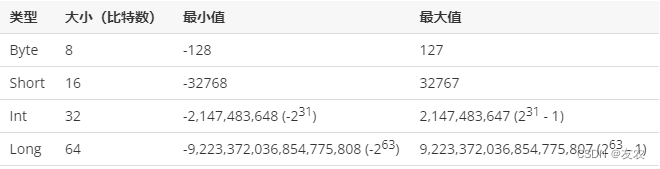
由于Kotlin支持类型推断,所以在使用时若超出Int的范围则会被认定为其它类型;若需要显式指定Long型值,则需要在值后添加L后缀。
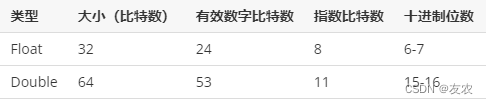
2.浮点数
3.比较两个数( == 和 ===)
Kotlin 中没有基础数据类型,只有封装的数字类型,你每定义的一个变量,其实 Kotlin 帮你封装了一个对象,这样可以保证不会出现空指针。比较相等时,== 表示比较值, === 表示比较两个值得大小。
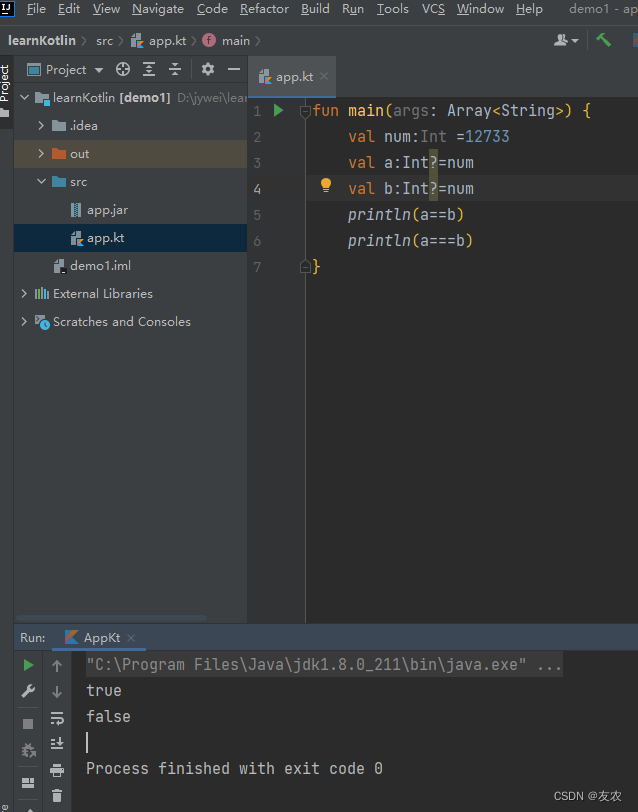
这里虽然都是将num的值赋值给a和b,但是Int?这种形式的写法会将其直接装箱。所以a和b的值相等,地址不相等
4.类型转换
在日常的开发中可能会使用到不同数值类型的转换,这个时候我们就可以使用to类型名就可以将其进行转化 ,如:
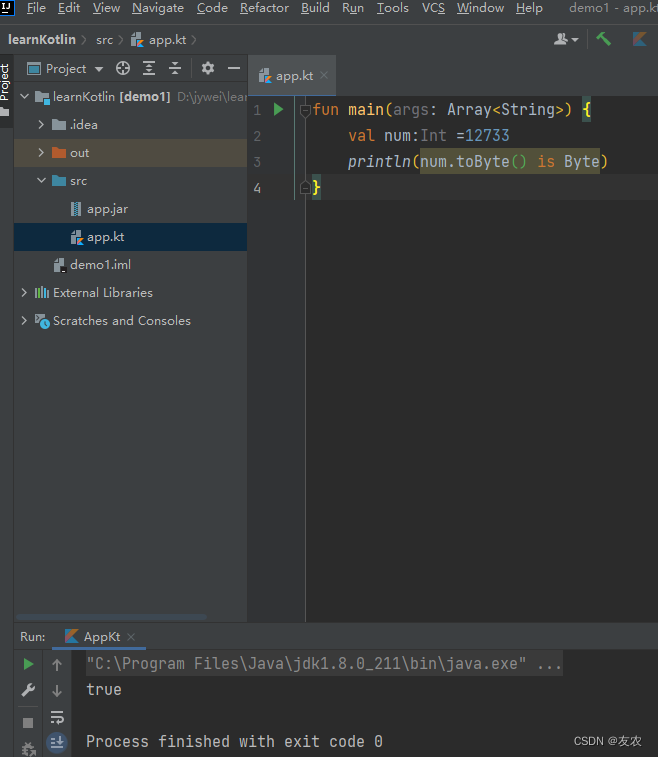
这样就将Int类型的数值转化成为了Byte
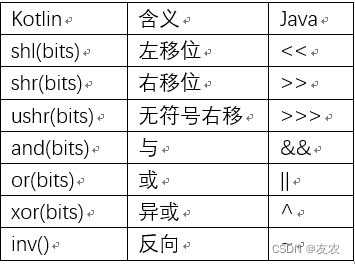
5.位操作符
Kotlin的位操作符和Java中不同,下面我们做一个对比:
6.字符和布尔
和 Java 不一样,Kotlin 中的 Char 不能直接和数字操作(但是可以显示把字符转换为数字),Char 必需是单引号 ’ 包含起来的。比如普通字符 ‘0’,‘a’。
布尔使用Boolean类型表示,和Java一样,有true和false两个值
7.数组
数组在 Kotlin 中使用 Array 类来表示,它定义了 get 与 set 函数(按照运算符重载约定这会转变为 [])以及 size 属性,以及一些其他有用的成员函数。
创建数组:
val arr= arrayOf(1,2,3,4,5)for (i in arr){println(i)}
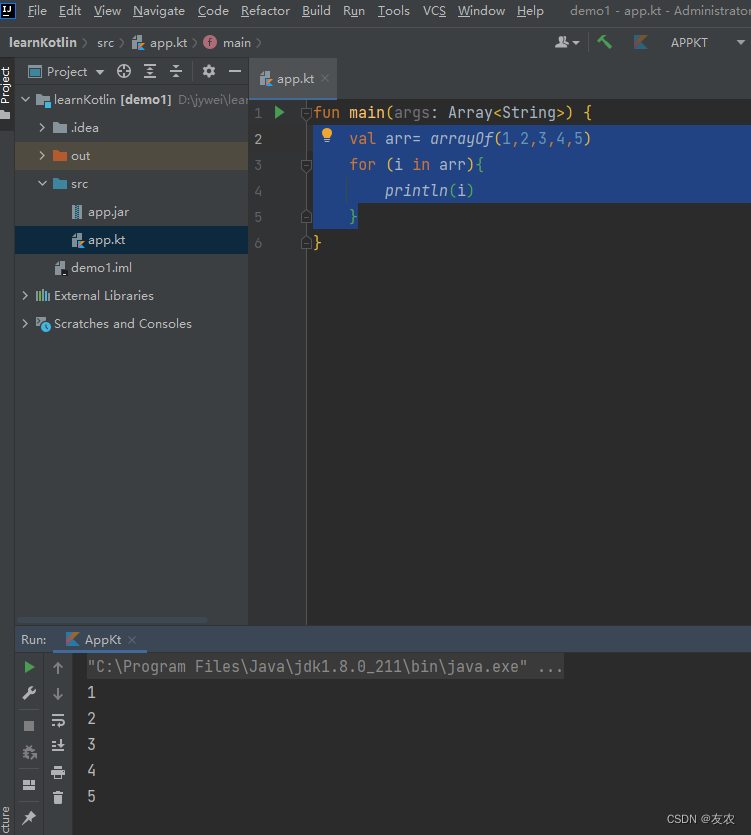
也可以像Java一样使用下标读取或者修改数组中的值,这实际也是调用了get和set方法。
8.字符串
和Java一样,Kotlin的字符串也不可变,但是可以使用索引运算法访问,也可以使用for循环迭代字符串:
val str:String="abc"println(str[0])for (i in str){println(i)}

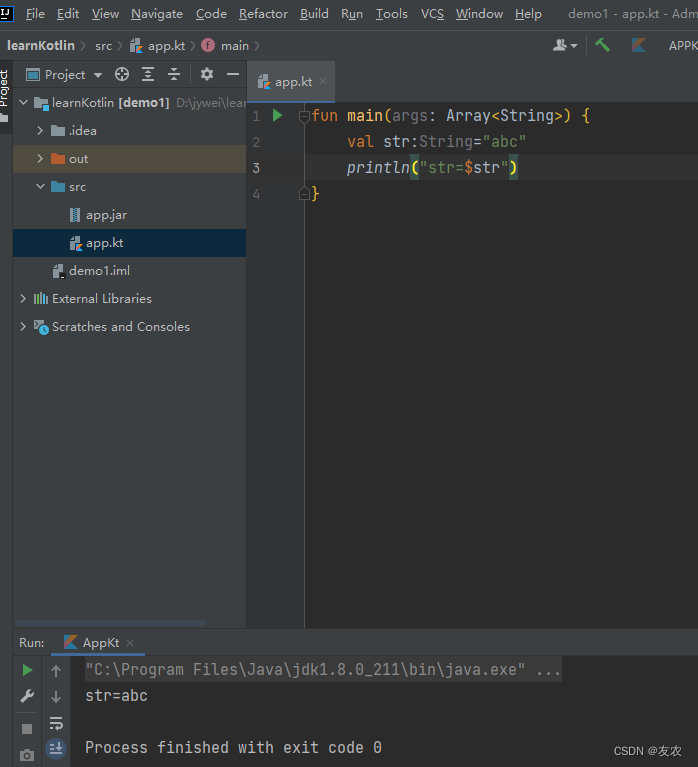
字符串模板:
字符串字面值可以包含模板表达式 ,即一些小段代码,会求值并把结果合并到字符串中。 模板表达式以美元符($)开头,由一个简单的名字构成。
二、基础语法
1.函数
Kotlin的函数至少满足以下几点:
- 使用fun关键字修饰
- 需要函数名
- 函数体
具体集中写法如下:
1.无返回值函数(Unit函数)
fun myFun(){println("myFun")}
2.带有两个 Int 参数、返回 Int 的函数
fun myFun(a: Int, b: Int): Int {return a + b
}
3.匿名函数(lambda表达式)
匿名函数虽然没有名字,但是可以赋值给变量,这个变量的类型就是函数类型。和具名函数不一样,匿名函数通常不需要return关键字返回数据。匿名函数会隐式的或自动返回最后一行代码的执行结果。
fun main() {//声明一个匿名函数,并赋值给变量myFunval myFun: () -> String = {"Hello world!"}//匿名函数调用println(myFun())
}
带参数的匿名函数:
fun main() {val myFun: (name: String) -> String = { name ->"Hello $name!"}println(myFun("jywei"))
}
当参数只有一个时,可以使用关键字it指代,上述代码可写成:
fun main() {val myFun: (name: String) -> String = {"Hello $it!"}println(myFun("jywei"))
}
4.可变长参数函数
在Java中可变长参数可以使用数组或者…表示,在kotlin中可以使用vararg进行标识:
fun vars(vararg v:Int){for(vt in v){print(vt)}
}// 测试
fun main(args: Array<String>) {vars(1,2,3,4,5) // 输出12345
}
2.变量、常量、注释
在Kotlin中使用val修饰常量(不可变),使用var修饰变量(可变)
Kotlin中的注释有很多种
//行注释
/*多行注释*/
/* 注释从这里开始/* 包含嵌套的注释 */ 并且在这里结束。 */
3.字符串模板
$ 表示一个变量名或者变量值
$varName 表示变量值
${varName.fun()} 表示变量的方法返回值:
var a = 1
// 模板中的简单名称:
val s1 = "a is $a" a = 2
// 模板中的任意表达式:
val s2 = "${s1.replace("is", "was")}, but now is $a"
4.空值与null检测
当某个变量的值可以为 null 的时候,必须在声明处的类型后添加 ? 来标识该引用可为空。
使用返回可空值的函数:
fun printProduct(arg1: String, arg2: String) {val x = parseInt(arg1)val y = parseInt(arg2)// 直接使用 `x * y` 会导致编译错误,因为它们可能为 nullif (x != null && y != null) {// 在空检测后,x 与 y 会自动转换为非空值(non-nullable)println(x * y)}else {println("'$arg1' or '$arg2' is not a number")}
}
或者
if (x == null) {println("Wrong number format in arg1: '$arg1'")return
}
if (y == null) {println("Wrong number format in arg2: '$arg2'")return
}// 在空检测后,x 与 y 会自动转换为非空值
println(x * y)
5.类型检测与自动类型转换
可以使用is判断一个变量或者常量是否属于某个类型,可以使用!is判断一个变量或者常量是否不属于某个类型。
6.区间
Kotlin可以使用…表示区间
for (i in 1..4) print(i) // 输出“1234”for (i in 4..1) print(i) // 什么都不输出if (i in 1..10) { // 等同于 1 <= i && i <= 10println(i)
}// 使用 step 指定步长
for (i in 1..4 step 2) print(i) // 输出“13”for (i in 4 downTo 1 step 2) print(i) // 输出“42”// 使用 until 函数排除结束元素
for (i in 1 until 10) { // i in [1, 10) 排除了 10println(i)
}
上一篇:Kotlin新手教程一(Kotlin简介及环境搭建)