金华网站建设报价网站建设情况自查报告
大模型技术正在引领新一轮工业革命,但将其应用于工业制造,仍面临许多挑战,专业知识的缺乏是关键难点。11月5日,香港中文大学终身教授、思谋科技创始人兼董事长贾佳亚受邀参加第六届中国国际进口博览会暨虹桥国际经济论坛开幕式。虹桥论坛上,贾佳亚在主题演讲中表示,“目前,业界还没有一个能真正服务于高端智能制造的大模型。”

贾佳亚在虹桥国际经济论坛上发表主题演讲
亟待人工智能技术提高、释放生产力的工业制造界盼大模型已久,至此终于迎来全球首个工业多模态大模型IndustryGPTV1.0。论坛上,贾佳亚和团队正式发布IndustryGPT V1.0并公布相关技术细节。
思谋倾注了核心团队二十多年的技术积累、深度的行业洞察、海量的精炼数据,让大模型真正实现在产业端的商业化落地。贾佳亚表示,“IndustryGPT将持续开发并走向真正的智能体,把丰富的数据能量持续转化成新型工业化的技术助力、转化成实体经济高质量发展的新动能。”
进博会期间,思谋科技分别与知名跨国公司松下电器、江森自控签定战略合作,未来将在智能制造、数智化创新领域深度合作,并联合全球先进智能制造力量,打造一体化智能制造集成解决方案,积极构建开放协作发展的新平台,引领全球工业制造进入全新的智能时代。
IndustryGPT:最懂工业制造的大模型
制造业是一个高度专业化的领域,且细分行业众多,这导致不能简单地将一个通用大模型应用于生产环境。即便是当前最负盛名的通用大模型GPT-4,也由于缺少专业知识、无法理解工业场景的具体需求,而无法准确回答制造行业的相关问题、识别常见的工业缺陷,或生成相关的业务流程和代码。

GPT4在工业领域能力不足,无法识别金属产品的表面缺陷
AIGC风生水起,然而还没有任何一个大模型真正服务于高端制造业。如今,工业大模型空白的局面被IndustryGPT打破,传统企业也得以分享人工智能技术驱动下的,智能制造高速增长红利。
IndustryGPT的开发者是独角兽企业思谋科技。思谋核心团队拥有20多年的人工智能技术研发经历,自成立起,便专注于智能制造,目前已服务全球各行业头部企业超200家,积累了完备的制造业智能化升级的知识与经验,以及不同场景的工业数据,为工业大模型的开发,奠定了技术与行业基础。
数据是工业大模型开发的重中之重,要想成为工业专家,需要进行大量独特的数据处理和分析。为此,思谋收集整理了市面上包括光、机、电、算、软五大学科,电子、装备、钢铁、采矿、电力、石化、建筑、纺织等八大行业的全面知识,以及多年研发、生产服务积累的独特数据,共涵盖200+不同工业场景,超300万张工业图像,超500亿Tokens!通常来说,一个工科博士毕业生的阅读量约50万词,而IndustryGPT的训练数据相当于10万博士毕业生的总量。
在此基础上,思谋对数据进行精炼:针对高质量的书籍、论文数据,做专门的OCR处理,最大程度保证专业知识的完整性;针对工业数据训练了专业的精炼模型,对工业专业名词、公式、定理进行规范化处理,保证数据质量稳定性;并邀请超100位工程专家,对批次数据质量进行抽样评估,并进行“文本对”数据编写。
全新交互模式,实现产业落地
作为最懂工业的大模型,IndustryGPT倚仗的是思谋在工业制造中多年的专业知识、数据积累和对客户需求的洞察,它也将凭借强大的功能,为智能制造带来全新范式,注入强劲动力。
贾佳亚在论坛上表示,IndustryGPT打破了传统人机交互的界限,将大模型技术与工业软、硬件相结合,为用户提供了更加直观、便捷的使用体验。无论是工程师、生产管理者,还是产线工作人员,均可以轻松上手、“开箱即用”。
在与人沟通上,IndustryGPT专业知识信手拈来。它可理解场景意图,轻松回答生产环境中的问题,提供精准决策支持。无论是产品信息、生产工艺、原材料选择还是设备运行状况,IndustryGPT都能一一提供详尽、准确的解答。
IndustryGPT可回答产线设备运行状况、设备使用事项等信息
在与软件沟通上,IndustryGPT革新了工业软件操作及交互方式。以思谋SMore ViMo为例,这是一款端到端的工业智能通用型平台,打通了从模型生产到部署应用的全流程,积累了超1000个细分行业场景。在学习SMore ViMo平台的技术文档后,IndustryGPT可理解机器学习模型开发流程,在接收用户的自然语言命令时,驱动ViMo智能推荐、自动创建算法方案,并完成数据标注、调参、训练等操作。在某分类检测案例中,IndustryGPT选择的方案耗时5分钟27秒,且精确率和召回率均达100%,而人工训练下方案耗时长达9分钟31秒,精确率仅50%、召回率66.7%。

IndustryGPT驱动ViMo进行自动化模型选择及训练,提升模型开发效率
在与硬件沟通上,IndustryGPT还改变了数字世界与物理世界的连接方式。以手机中框质检设备的采图为例,传统自动化操作平台需要运营人员花费至少2小时去完成点位设置、采图作业、效果验看、参数调整等流程。而正在研发的使用IndustryGPT驱动硬件智能设备的功能,用户使用自然语言下达指令,通过几次简单对话,最快5分钟完成任务。
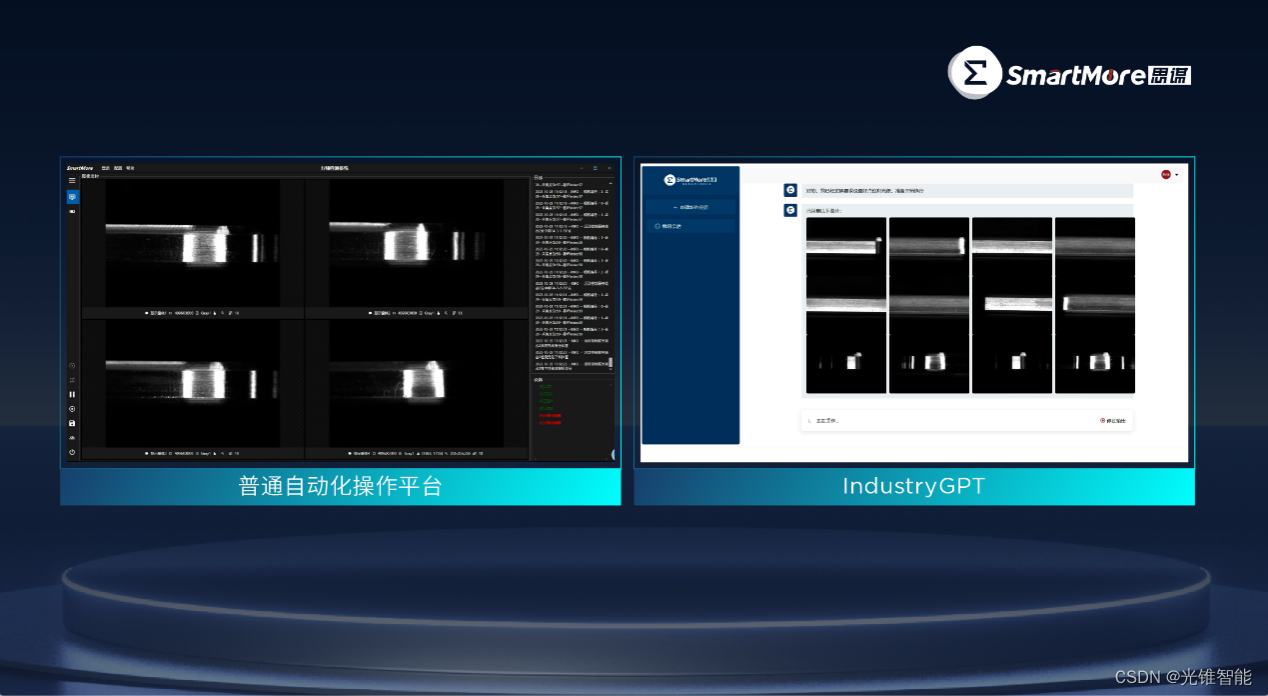
使用IndustryGPT驱动智能质检设备快速完成采图操作
贾佳亚透露,“IndustryGPT 将基于V1.0版本上持续开发,并走向真正的智能体。”届时,IndustryGPT将使机械系统不再是僵化的实体,而是成为可根据实时需求和数据变化做出智能决策,实现自主控制和协作的智能体。
现场牵手松下、江森自控
自成立以来,思谋始终以打造更普惠、更通用的智能化产品与解决方案为使命,沿着“传统视觉-深度学习-大模型”路径逐步迈进,不断推动人工智能技术在工业领域的落地。
2021年,思谋推出多个具备光机电算软全链路能力的行业综合解决方案;2022年,思谋自研3C行业“智慧工人”通用柔性五轴检测装备;2023年6月,思谋发布了行业首个工业大模型开发与应用底座SMore LrMo,到如今正式推出IndustryGPT V1.0。
基于持续的技术创新,思谋在全球范围内受到广泛欢迎,服务客户名单包括多家跨国巨头、世界500强企业,如卡尔蔡司、博世、佳能、大陆集团、舍弗勒等。11月7日,思谋更是在进博会现场与松下、江森自控两家全球性企业,签定了战略合作协议,进一步拓展了国际业务版图。

松下与思谋科技战略合作签约现场
据悉,思谋将与松下在“智能制造”及“数智化创新”领域,深入挖掘合作机会,同时建立高层沟通和负责人互访的机制,在利用AI画像检查自动化、智能制造、数智工厂、智能算法调优等相关合作项目中创造更高效、更灵活、更先进的生产制造。

江森自控与思谋科技战略合作签约现场
思谋将携手江森自控,针对新能源、电子半导体、汽车配件等工业领域,联合打造从厂务设施、工艺产线到整座工厂的一体化智能制造集成解决方案。
松下、江森自控均是百年传承的全球性企业,深受广大消费者信赖。如今松下、江森自控,均与年轻的科技独角兽思谋战略合作,携手迎接全球工业4.0浪潮,充分说明思谋深耕智能制造赛道,在注重科技创新的同时,聚焦工业场景,将最先进的技术产品,切实运用到生产一线并得到规模化复制和推广,赢得了全球合作伙伴的高度认可和信赖。
IndustryGPT的发布,将工业领域正式带入大模型时代,也为大模型商业化落地、开启to B服务找到完美入口。未来,IndustryGPT将以更快的速度进行迭代,思谋也将以更创新的技术实力、更高效的产品和解决方案。