网站支付页面怎么做昆明官网seo诊断
系列文章目录
stable diffusion实践操作
文章目录
- 系列文章目录
- 前言
- 一、LyCORIS是什么?
- 二、使用步骤
- 1.下载
- 2.安装
- 3 使用
- 二、整理模型
- 1.LoHa-v1.0-pynoise
- 总结
前言
LyCORIS,可以理解为lora的加强版本。
LyCORIS - Lora beYond Conventional methods, Other Rank adaptation Implementations for Stable diffusion.
超越传统Lora的方法,应用在SD上
github最新地址:https://github.com/KohakuBlueleaf/LyCORIS
本章根据B站A_Eye视频整理而来,再次感谢,如果想要看原视频的童鞋,可以:
连接入口:Stable diffusion喂饭级基础教程 第十三期 什么是LyCORIS模型
另外这里有一篇模型文章:
https://www.bilibili.com/read/cv23098823/
一、LyCORIS是什么?
常见的有两种

二、使用步骤
1.下载
在网站https://www.liblibai.com/上筛选,然后就可以出来很多。

2.安装
首先,安装a1111-sd-webui-lycoris插件
如果有不会安装的童鞋,可以参考:
链接入口:插件安装教程

3 使用
安装好插件后,可以在webUI上看到如下界面:

使用的时候和lora一样,不过还有一种升级用法:

作者给了几种不同的书写方式:
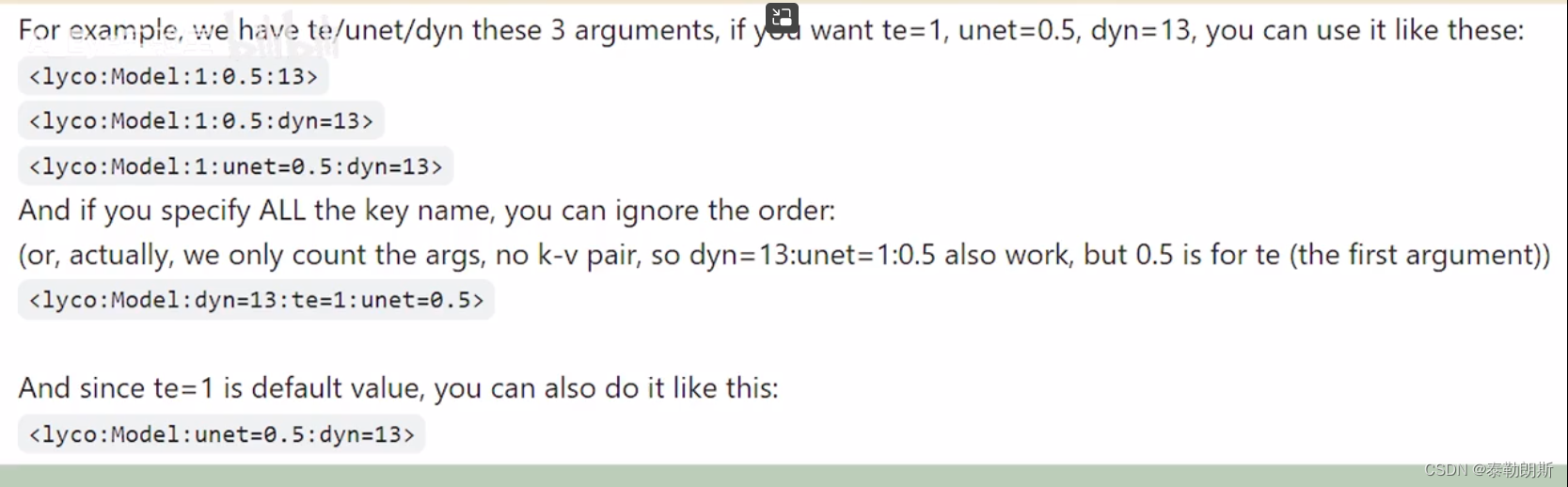
依次是
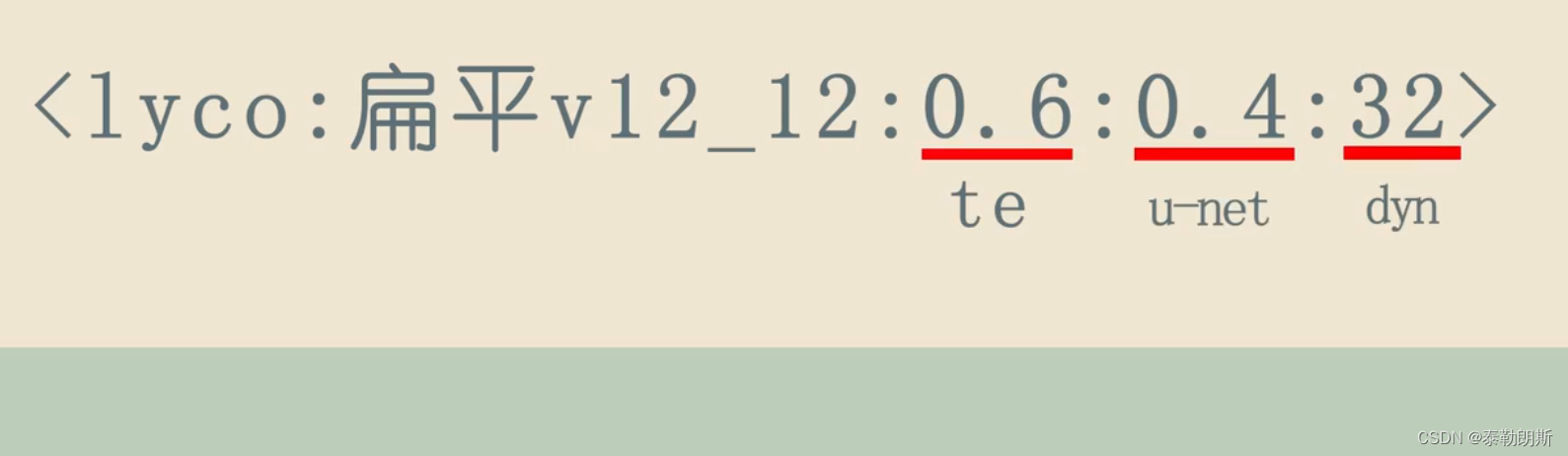
那么热这几个参数是什么意思

那么什么是dylora呢?下面是论文描述

我们可以理解为dylora是lora的一种新型训练技巧,它将训练lora时的dim值由固定变为了动态可调整的参数

那么什么是dim参数?在训练lora的时候,dim参数是特征的数量,也就是输入数据的维度。

二、整理模型
1.LoHa-v1.0-pynoise
基础模型:SD1.5
触发器:Ambilight
采样器:Euler a
步数:30
CFG:7
seed:1841641950
正向提示词:
Ambilight, masterpiece, ultra-high quality,( ultra detailed original illustration),
( 1girl, upper body),(( harajuku fashion)),(( flowers with human eyes, flower eyes)),
double exposure, fussion of fluid abstract art, glitch,( 2d),( original illustration composition),
( fusion of limited color, maximalism artstyle, geometric artstyle, butterflies, junk art) <lora:Ambilight-pynoiseloha-000003:0.6>
反向提示词
easyNegative,(realistic),(3d face),(worst quality:1.2), (low quality:1.2), (lowres:1.1),
(monochrome:1.1), (greyscale),(multiple legs:1.5),(extra legs:1.5),(wrong legs),
(multiple hands),(missing limb),(multiple girls:1.5),garter straps,
multiple heels,legwear,thghhighs,stockings,golden shoes,railing,glass
作者介绍:
his is a LoHa model that trained by 40+ img ,and it’s the multires noise version.
I use multires noise to generate a powerful painting stroke. The scenery appear very colorful brush,and that’s where the name ambilight comes from.
You can use the LoHa to design scenes in portrait.
Trigger is ambilight,and weight 0.5-0.6 will perform better on figures, higher weight will more realistic

照片对比,背景不一样其余差距还是蛮大。
 图1 官方 图1 官方 |  图2 个人 图2 个人 |
感觉应该是权重的问题,重新调整:
(后续慢慢追加)
总结
提示:这里对文章进行总结:
例如:以上就是今天要讲的内容。