怎么样创办一个网站豆瓣网站是怎么建设的
前言;c++类和对象的知识点中除了几种默认函数, 比较重要的还有使用const和static修饰成员相关知识点。const在c++中特性很简单。 但是在使用中, 比较容易疏忽大意出现问题。 static特性也很简单, 但是比起const来要直接的多。 在使用中只要熟练语法以及底层原理。就不容易出错。
本节内容主要是对其进行详细的解析。相信本节内容可以让你对这两种语法有一个更深层次的认识。(注:如果想要进阶const的使用 以及 对类和对象的认识, 建议自己实现vector的stl。 list也可以, 但是list的stl的迭代器比较复杂, 需要对类和对象有一定的理解。)
const
在讨论const修饰类的成员之前。 我们先需要知道const的用法。
c++的const 与c语言const的区别
c++中的const比c语言中的const更加严格。在c语言中, 我们使用const定义一个常量后, 这个常量并不是真正意义上的常量,它还保存在栈区。 我们如果定义一个指向这个空间的指针。 那么我们还是可以对这块空间进行修改的。
但是在c++中。 如果我们使用const定义了一个常量。 那么我们如果再使用一个指针变量保存这块内存的地址。 会报错。编译不通过。 这是因为使用const修饰的变量相当于放在了常量区。(这里是相当于放在了常量区。事实上,当我们进行源代码编译的时候, 变量被编译成对应的常量, 这个常量保存在哪个区, 取决于你在哪里定义的变量。 如果是在栈区, 那就是被存储在了栈区。 所以使用const修饰变量不会改变该数据存储的位置。这个位置是在编译时期就决定的, 不是在运行时期决定的。)我们想要访问这块空间只能通过常量指针来进行访问(只读)。
const的权限平移,放大, 缩小问题
在c++中, 权限只能平移或者缩小, 不能放大。 如图:
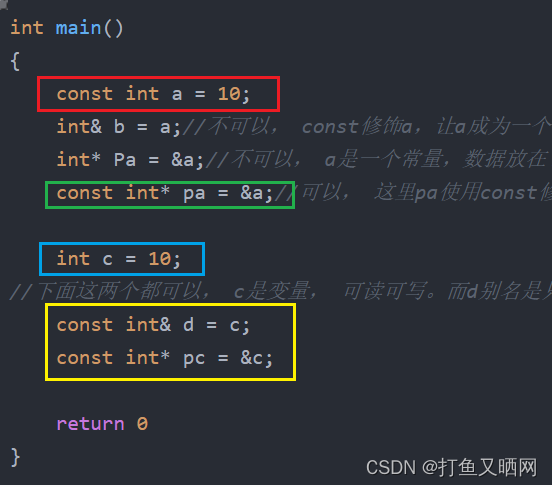
int main()
{const int a = 10;int& b = a;//不可以, const修饰a,让a成为一个常量,数据放在了常量区,只读。 int& b是一个可读可写的类型。 相当于权限放大。 int* Pa = &a;//不可以, a是一个常量,数据放在了常量区。a的内容不可被修改, 只读。 使用指针找到这块空间后,也不能修改。 但是pa是一个可读可写的类型。 相当于权限的放大。const int* pa = &a;//可以, 这里pa使用const修饰, 变成只读。 相当于权限的平移。 int c = 10;
//下面这两个都可以, c是变量, 可读可写。而d别名是只读的。 pc也是只读的。都相当于权限的缩小。 const int& d = c;const int* pc = &c;return 0
}看这张图中的红框框, 红框框是使用const修饰的一个int类型的变量。 然后使用了一个int类型的引用b作为a的别名。
这么写是错误的。 a被const修饰, 具有常性,只读。 而b是一个不加const修饰的引用别名, 只是一个单纯的变量, 可读可写。 想一想,如果这里是对的, a本身都不可以改变自己, 那么如果通过b这个别名可以来对a进行修改, 这不就乱了吗?所以, c++设定了权限只能平移和缩小, 不能放大。
同样的, 我们看一下下面的几个示例。
1.首先, 我们来看一下红框框和绿框框, 这个对不对呢?
答案是对的, 因为a被const修饰, 具有常性。 但是pa也被const在int*前面修饰, 这里相当于指针指向的空间不可被修改, 称为常量指针(常量指针是指向常量的指针, 另一个叫做指针常量, 是不能改变指向的一个指针常量)。所以是权限的平移, 可以被编译器通过。
2.然后, 我们来看一看蓝框框和黄框框是不是对的呢?
答案是对的, c是一个int类型的变量。 而d作为c的别名, pc作为c的指针。 都是被const修饰, 都具有常性。 权限缩小。 编译器可以通过。

const 修饰类中的成员
在C++中,const关键字可以用来修饰类的成员函数。一个被const修饰的成员函数被称为常量成员函数,它不会修改类的内部状态。
常量成员函数的声明和定义格式如下:

常量成员函数可以在常对象上调用,它们也可以在非常对象上调用。但是,常量对象上只能调用常量成员函数,而非常对象上可以调用常量成员函数和非常量成员函数。因为常对象是一个只读的类型。而且类的实例化对象在调用成员函数的时候会把自己的this指针传送过去。 而常量成员函数中的const本质上是修饰的成员this指针。所以常对象在调用常量成员函数的时候, 地址给const修饰的this,是权限的平移。 可以编译通过。 但是如果常对象调用非常量成员函数, this指针是可读可写的, 属于权限的放大。编译不能通过。
const修饰成员函数, 本质上就是修饰的成员函数中的this指针。 让this指针从可读可写变为只读的,也就是常量指针(注意区别常量指针和指针常量的区别)。
const修饰返回值和修饰成员函数
const修饰返回值和const修饰成员函数是不同的。 但是我们通过是否使用const修饰成员函数来区分一个成员函数的返回值是否是const修饰的常量。 就比如迭代器的实现, stl中的迭代器一般都有如下两种类型:
iterator;//迭代器 const_iterator;//只读迭代器
iterator和const_iterator的实现其实就用到了const修饰, 来区分两种迭代器重载。
如下是list中迭代器的实现部分代码:
(只需关注const修饰成员函数来形成重载这种思想。 list迭代器的具体实现不需要关注,后续会有专门一节来实现list的stl)
///迭代器iterator begin() {return iterator(_head->_next);}iterator end() {return iterator(_head);}///只读迭代器。 如果没有这个const修饰, 他和上面的迭代器构不成重载const_iterator begin() const{return const_iterator(_head->_next);}const_iterator end() const{return const_iterator(_head);}
注意红框框。

const比较容易出现问题的地方
如图是vector的标准库中的size()和capacity()的模拟实现
public://………………………………public中的其他成员
size_t size() const{return _finish - _start;}size_t capacity() const{return _end_of_storage - _start;} //……………………………………public中的其他成员private:T* _start;T* _finish;T* _end_of_storage;这两个成员函数的实现必须使用const修饰。 为什么呢?因为size()和capacity是只读的。 他们不涉及成员变量的修改。 注意, 这里很重要。 也有点难以理解。
我们说如果一个对象是常量。 那么这个常量对象只能调用const修饰的成员函数, 这里没问题吧。
然后, 假如, size()和capacity()没有被const修饰, 那么假如我们想计算常量对象的大小时, 是不是就无法调用这两个函数。 所以这显然是不对的。而且, 这个常量对象, 我们是不是一定不会去修改它?所以也就不需要调用那些涉及修改数值的函数。 那么, 那些涉及修改数值的函数, 就不需要使用const修饰。 因为我们不会让const对象去调用他们。
但是, 如果一些不涉及修改数值的函数, 我们在使用const对象时, 是不是可能去调用这种不修改数值的函数。 这些函数如果没有使用const修饰的话。 const对象就调不动他们。 这不符合我们的需求。所以我们必须给不修改数值的成员函数加const修饰。
由以上分析, 我在这里总结一个结论:设计修改数值的成员函数, 按照需要看是否加const修饰成员函数。 不涉及修改数值的成员函数, 一定要加const修饰成员函数。
这个结论正在随着我代码量的提高逐渐深刻。 当涉及容器的套娃时,可能会出现例外。 但是本人认为可以加深对于成员函数, 成员变量之间关系的理解。
static
static在c++中的作用
static在c++用和在c语言中的应用场景类似。 都是用来修饰变量或者函数。 这里的变量或者函数包括类的成员变量和类的成员函数。
在全局作用域修饰变量或者函数
static在全局作用域修饰变量或者函数时, 这个变量或者函数属于整个源文件。 但是不属于项目中的其他源文件。 其他源文件无法调用static在全局修饰的成员或者函数。


在局部修饰变量或者函数
在局部修饰变量的时候, static修饰的变量生命周期变长,局部作用域销毁后,这个变量不会销毁。 但是使用的范围不变。 这个变量仍然只能在局部使用。也就是说, static修饰的成员的作用域是当前作用域, 但是生命周期变成了整个程序的生命周期。 它在程序运行时创建, 在程序结束时销毁。
static修饰类中成员
以上都是static修饰非类中的成员。
现在来看static修饰类中的成员。
static修饰成员变量
static修饰成员变量的性质
static修饰的成员变量不是属于对象的。 是属于整个类的。 它同样符合上面的性质:作用域属于当前作用域,也就是类域。 生命周期是整个程序的周期。
static成员变量与普通成员变量的区别
static成员变量会在程序开始运行时就被创建出来。 而一般的成员变量是在对象实例化的时候被定义的。 所以成员变量可以属于一个对象, 但是static修饰的成员变量只能属于整个类域。
同时, 一般的成员函数是无法访问static修饰的成员变量的。 为什么?很简单。 这里涉及到了成员函数为什么可以访问成员变量的知识点。
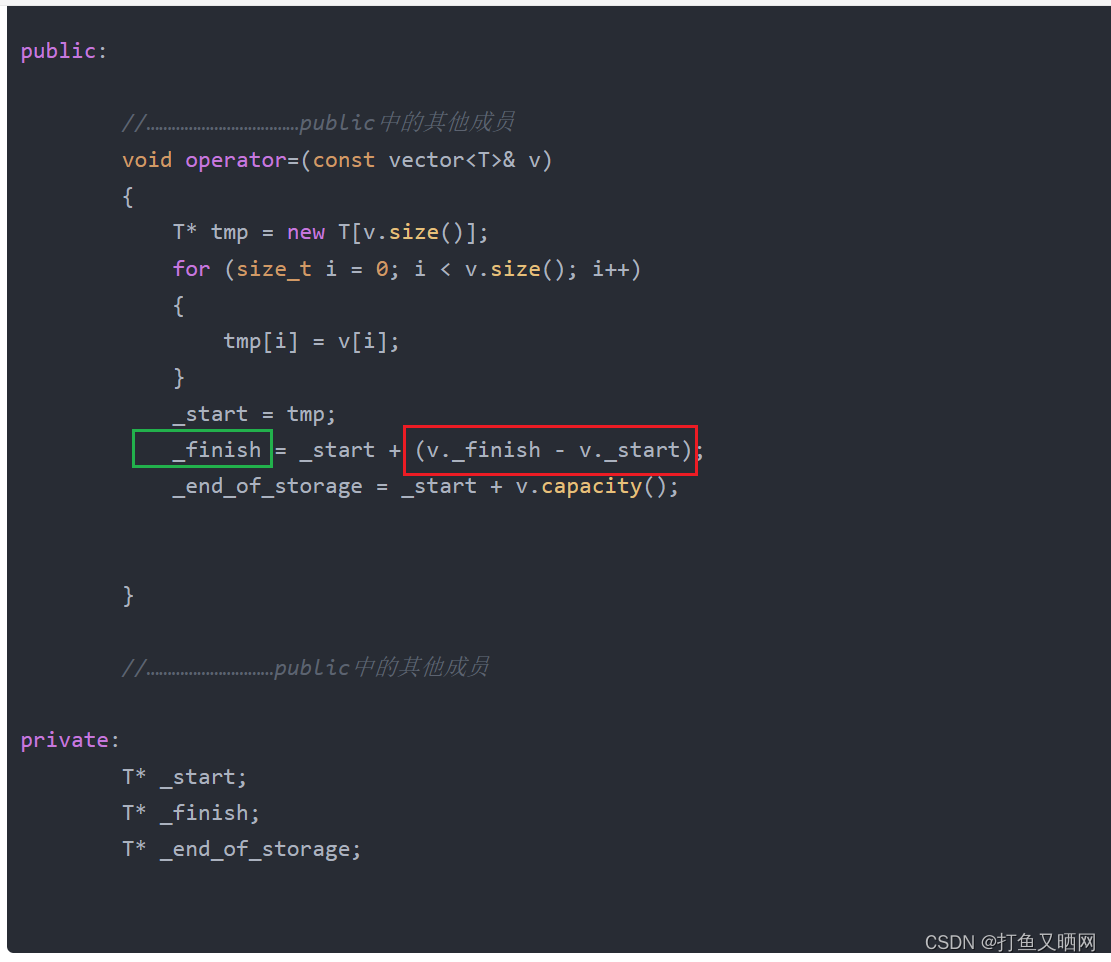
看这一串代码。
public://………………………………public中的其他成员void operator=(const vector<T>& v) {T* tmp = new T[v.size()];for (size_t i = 0; i < v.size(); i++) {tmp[i] = v[i];}_start = tmp;_finish = _start + (v._finish - v._start);_end_of_storage = _start + v.capacity();}//…………………………public中的其他成员private:T* _start;T* _finish;T* _end_of_storage;看绿框框和红框框。 绿框框中的_finish是调用成员函数的对象的成员变量。 它是this指针找到的。这里this指针隐藏了, 其实应该本质是this->_finish, 或者*this._finish.
红框框中的_finish和_start是v这个对象找到的。
我们可以把this指针和v比作一个采花许可证, 然后成员函数里面比作一个花园。然后成员变量就是花园里的一朵花。 只有我们在花园中, 而且我们有采花许可证的情况下。 我们才可以采到一朵花。
这里同样的也是这么一个问题。 只有我们在成员函数中, 或者说是类域中。 并且我们有this指针或者直接有一个有一个对象。 我们才可以访问thiis指针指向的变量或者对象本身的变量。
但是,static不属于任何一个对象。 没有任何一个对象有他的指针。 他就无法被对象访问到。 即使这个对象到了花园。
那么, 有什么方法可以访问到static成员变量呢?
static修饰成员函数
static修饰的成员函数可以用来访问static修饰的成员变量。 它是专门用来访问成员变量的。
但是,static修饰的成员函数只能访问它的参数、类的静态数据成员和全局变量,而不能访问非静态数据成员。 所以, static也可以用来限制某个函数。
具体看一下实例:
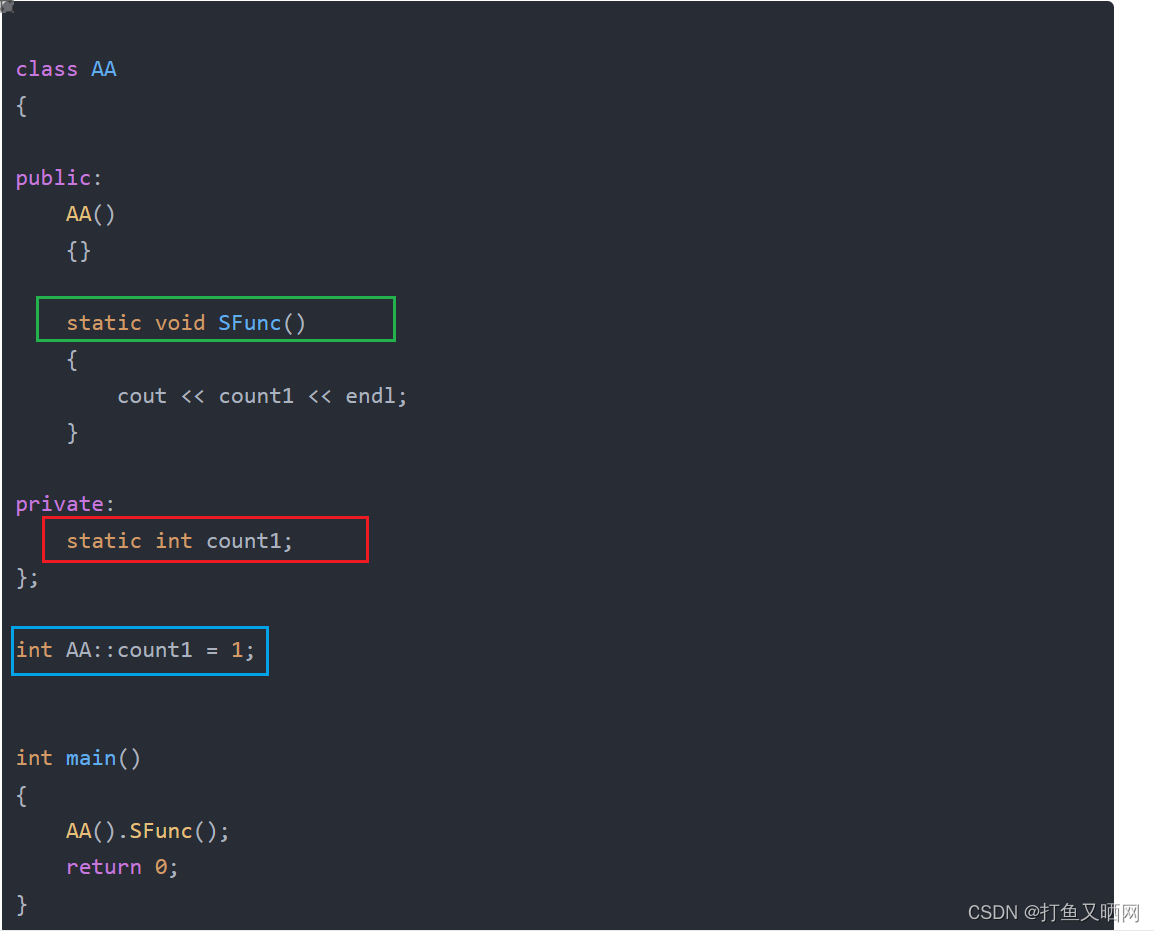
class AA
{public:AA(){}static void SFunc() {cout << count1 << endl;}private:static int count1;
};int AA::count1 = 1;int main()
{AA().SFunc();return 0;
}
图中红框框是我们定义的一个静态成员。然后, static修饰的成员变量要在类外面初始化。 这里蓝框框将它在外面初始化。
绿框框是我们通过静态成员函数访问count1成员。
以上, 就是本节全部内容。