建站之星模板怎么设置24淘宝网站建设
一、预览
在上一篇Servlet体系结构中,我们初步了解了怎么快速本篇将介绍Servlet中请求Request的相关内容,包括Request的体系结构,Request常用API。
二、Request体系结构
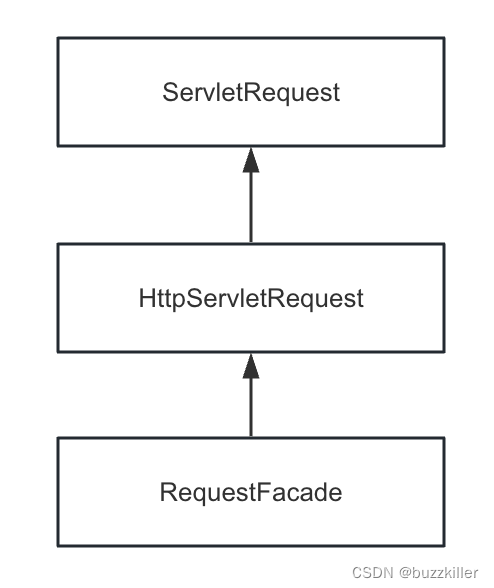
我们注意到我们定义的Servlet类若实现Servlet接口时,请求参数是ServletRequest类型的,若继承HttpServlet抽象类时,请求参数是HttpServletRequest类弄的,而这两个请求参数的类型都接口类型。在Servlet执行流程一文中,我们讲到过Servlet中的service方法是由Web服务器(如Tomcat)调用的,那么它在调用方法时传递的参数不可能是接口类型的,必然有其实现类。如上图,在Tomcat中,这一实现类就是RequestFacade类。
三、常用API
API的使用总是简单的,直接看如下代码与注释
package com.byhuang;import javax.servlet.ServletException;
import javax.servlet.annotation.WebServlet;
import javax.servlet.http.HttpServlet;
import javax.servlet.http.HttpServletRequest;
import javax.servlet.http.HttpServletResponse;
import java.io.BufferedReader;
import java.io.IOException;@WebServlet("/req1")
public class ServletRequestDemo extends HttpServlet {@Overrideprotected void doGet(HttpServletRequest req, HttpServletResponse resp) throws ServletException, IOException {// 1 请求行// 获取请求方式String method = req.getMethod();System.out.println(method);// 获取虚拟目录(项目访问路径)String contextPath = req.getContextPath();System.out.println(contextPath);// 获取URL(统一资源定位符)StringBuffer requestURL = req.getRequestURL();System.out.println(requestURL);// 获取URI(统一资源标识符)String requestURI = req.getRequestURI();System.out.println(requestURI);// 获取请求参数String queryString = req.getQueryString();System.out.println(queryString);// 2 请求头String header = req.getHeader("user-agent");System.out.println(header);}@Overrideprotected void doPost(HttpServletRequest req, HttpServletResponse resp) throws ServletException, IOException {// 3 请求体BufferedReader reader = req.getReader();String s = reader.readLine();System.out.println(s);}
}
四、通用方式获取请求参数
对于GET请求和POST请求,HttpServletRequest接口为我们提供了通用的获取参数的方法,具体使用见下面的代码与注释。
package com.byhuang;import javax.servlet.ServletException;
import javax.servlet.annotation.WebServlet;
import javax.servlet.http.HttpServlet;
import javax.servlet.http.HttpServletRequest;
import javax.servlet.http.HttpServletResponse;
import java.io.BufferedReader;
import java.io.IOException;
import java.util.Map;@WebServlet("/req2")
public class ServletRequestDemo2 extends HttpServlet {@Overrideprotected void doGet(HttpServletRequest req, HttpServletResponse resp) throws ServletException, IOException {System.out.println("get...");// getParameterMap 获取所有参数Map集合Map<String, String[]> parameterMap = req.getParameterMap();for (String key : parameterMap.keySet()) {System.out.println(key);String[] values = parameterMap.get(key);for (String value : values) {System.out.println(value);}}System.out.println("-----------");// getParameterValue 根据名称获取参数值(数组)String[] hobbies = req.getParameterValues("hobby");for (String hobby : hobbies) {System.out.println(hobby);}// getParameter 根据名称获取参数值(单个)String password = req.getParameter("password");System.out.println(password);}@Overrideprotected void doPost(HttpServletRequest req, HttpServletResponse resp) throws ServletException, IOException {System.out.println("get...");// getParameterMap 获取所有参数Map集合Map<String, String[]> parameterMap = req.getParameterMap();for (String key : parameterMap.keySet()) {System.out.println(key);String[] values = parameterMap.get(key);for (String value : values) {System.out.println(value);}}System.out.println("-----------");// getParameterValue 根据名称获取参数值(数组)String[] hobbies = req.getParameterValues("hobby");for (String hobby : hobbies) {System.out.println(hobby);}System.out.println("-----------");// getParameter 根据名称获取参数值(单个)String password = req.getParameter("password");System.out.println(password);}
}