网站开发计划时间中国工业设计十佳公司
步进电机
步进电机参考资料
- 野火官方文档
步进电机驱动原理
上面参考文档中有的内容就不写了,写一下我自己的总结吧。
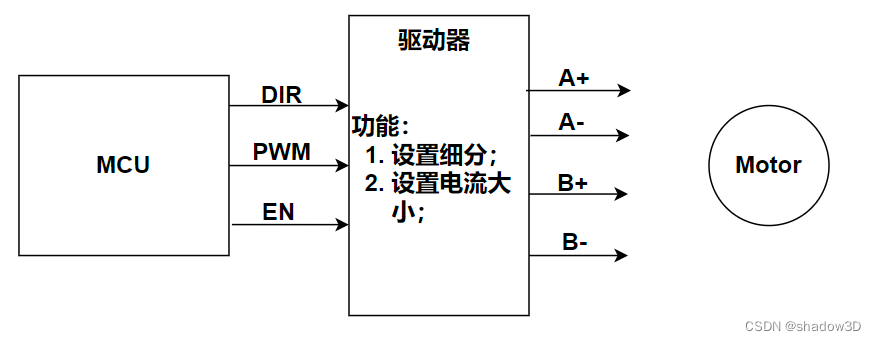
说明:
- 电机驱动器输入信号有电机转动方向信号
DIR,电机转速信号PWM,电机使能信号EN;- 电机驱动器输出信号根据电机决定,以一般的两相电机为例,有
A+,A-,B+,B-四路信号;- 电机驱动器的
EN输入信号有效时,电机根据DIR和PWM信号旋转,否则停止;- 电机驱动器的
DIR输入信号是通过控制给A+,A-,B+,B-各个相位线组提供不同的电流时序决定的;PWM信号可以控制电机转速,但是不是唯一的控制因素,还和驱动器的细分设置相关;对于一个转子齿数为50的两相步进电机来说,如果驱动器细分设置为64,则需要4*50*64=12800个PWM波形才能使电机旋转一圈;- 驱动器通过改变
A+,A-,B+,B-各个相位绕组电流大小的方式实现驱动器设置的细分。- 设置电流大小的功能,不一定所有的驱动器都有,貌似是为了在某些情况下减少功耗,对功能没有影响。
疑问
- 一般的两相电机步距角为
1.8°,是因为360 / 4 / 50 = 1.8,其中的4是表示两相共有4个线组;这个50表示线组上的转子齿数;那么这个转子齿数的选择是通过什么方式控制的呢?