网站总是跳转装修设计公司组织架构图
文章目录
- 前言
- 一、创建工程项目
- 二、界面布局准备工作
- 三、正式界面布局
- 总结
前言
一、创建工程项目
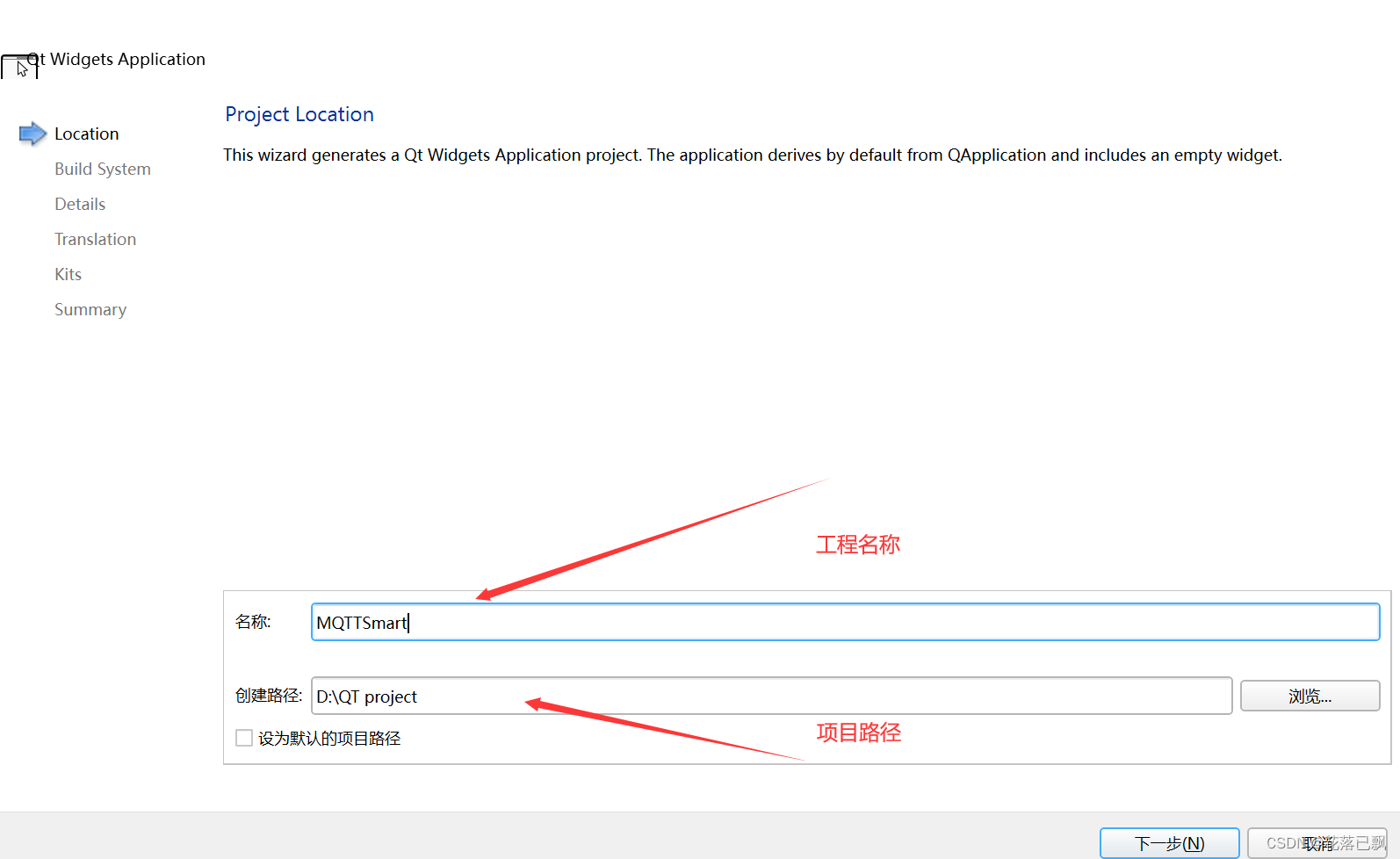
1.选择工程名称和项目保存路径
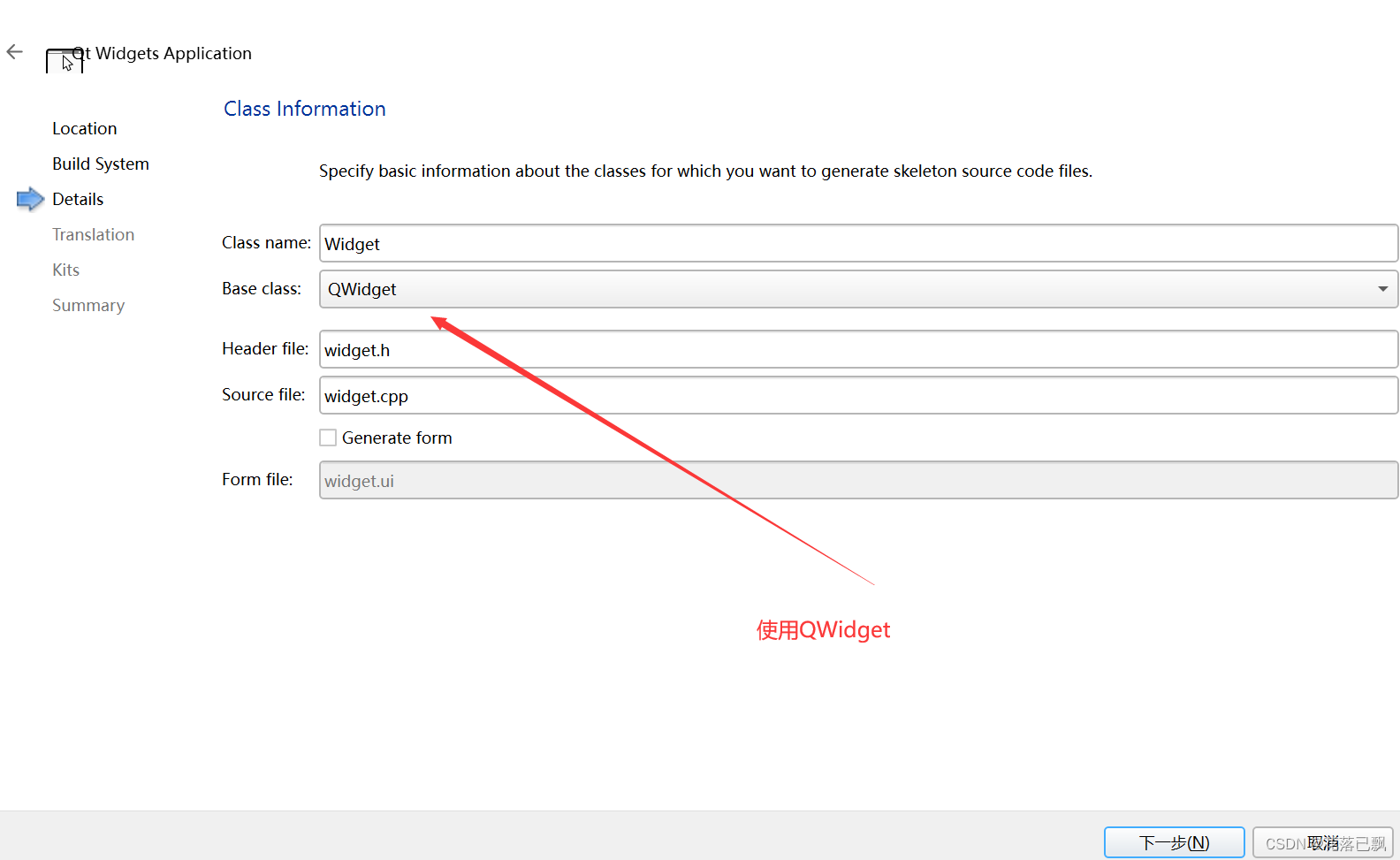
2.选择QWidget
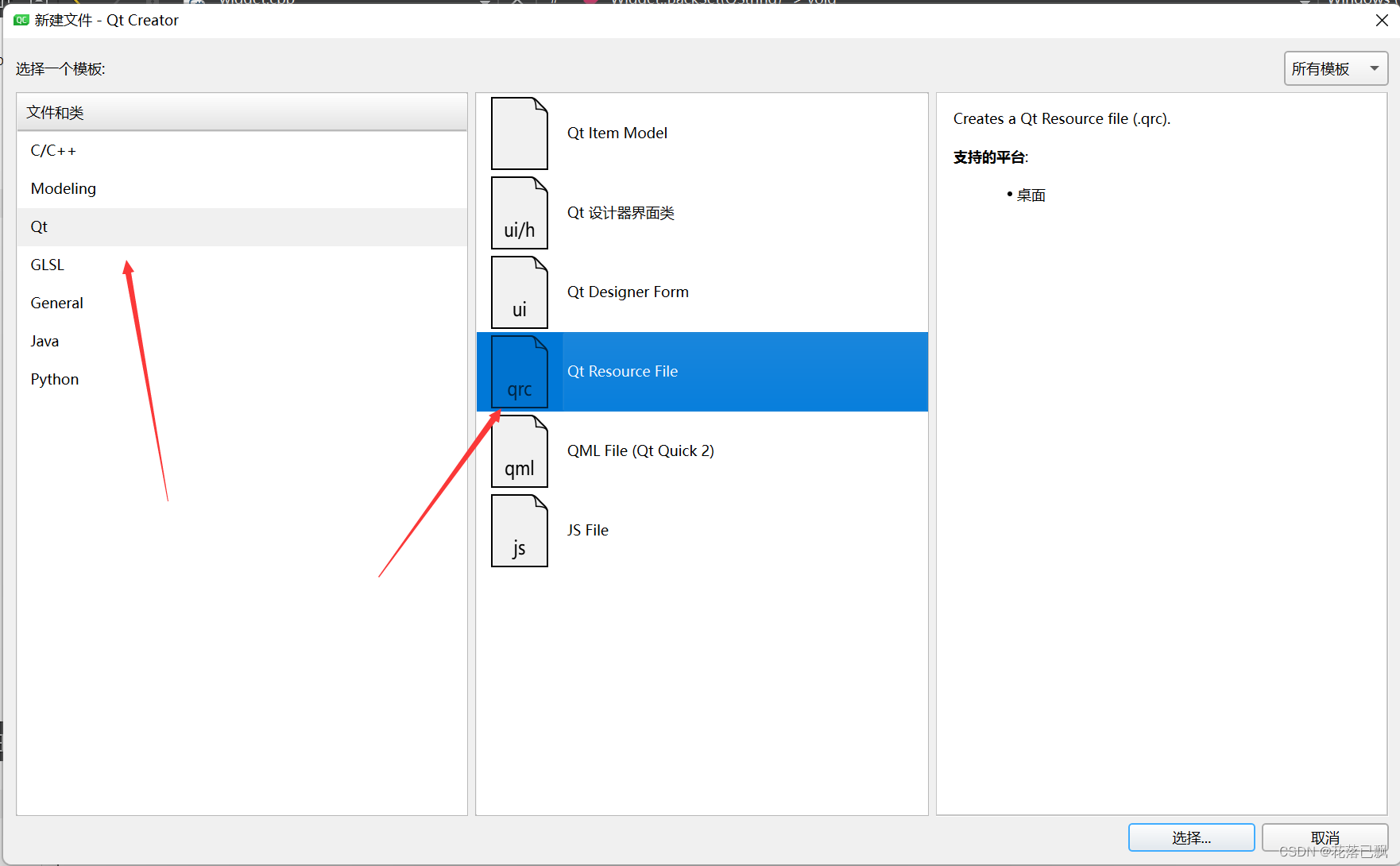
3.添加保存图片的资源文件:
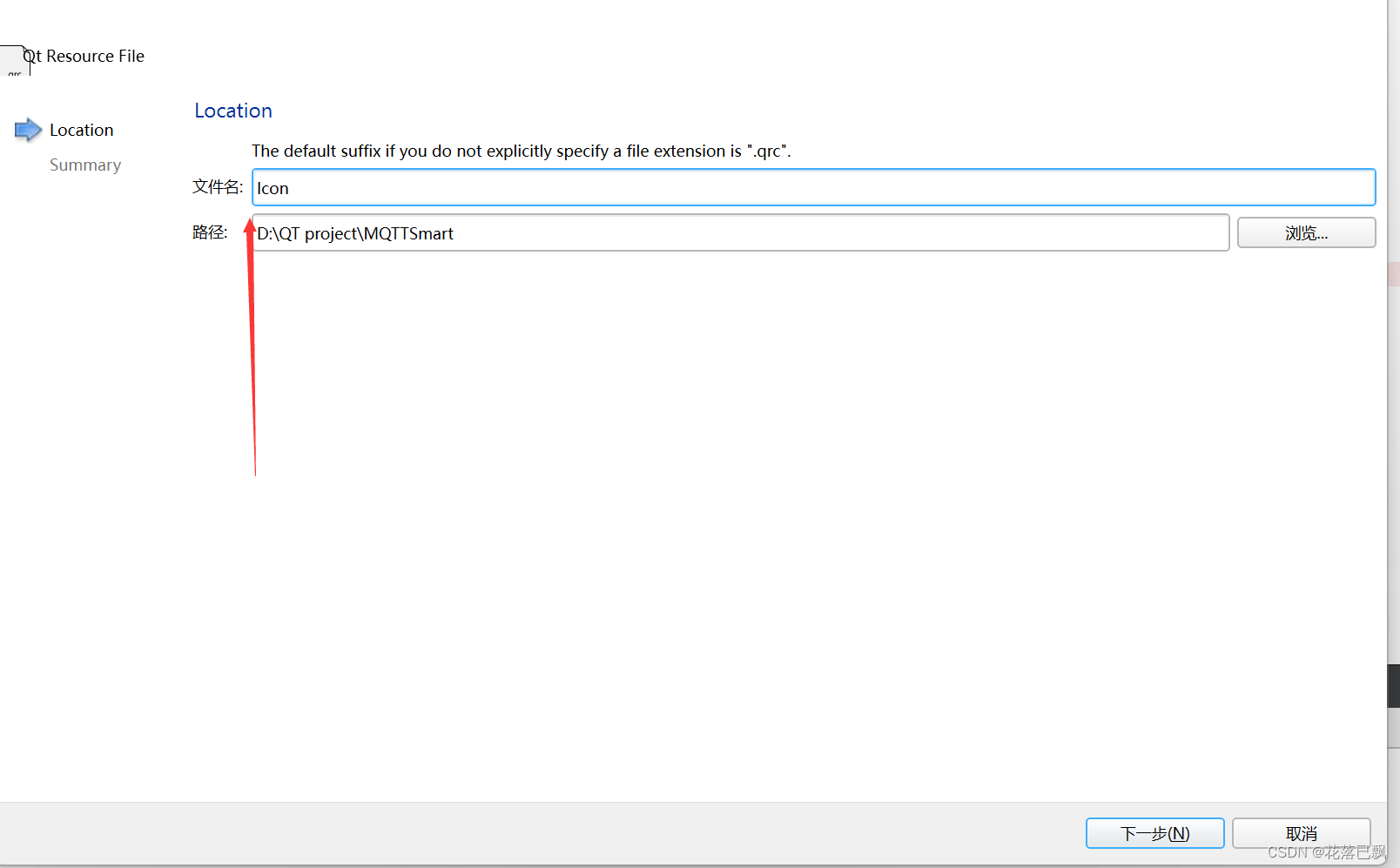
在工程目录下添加Icon文件夹保存图片:
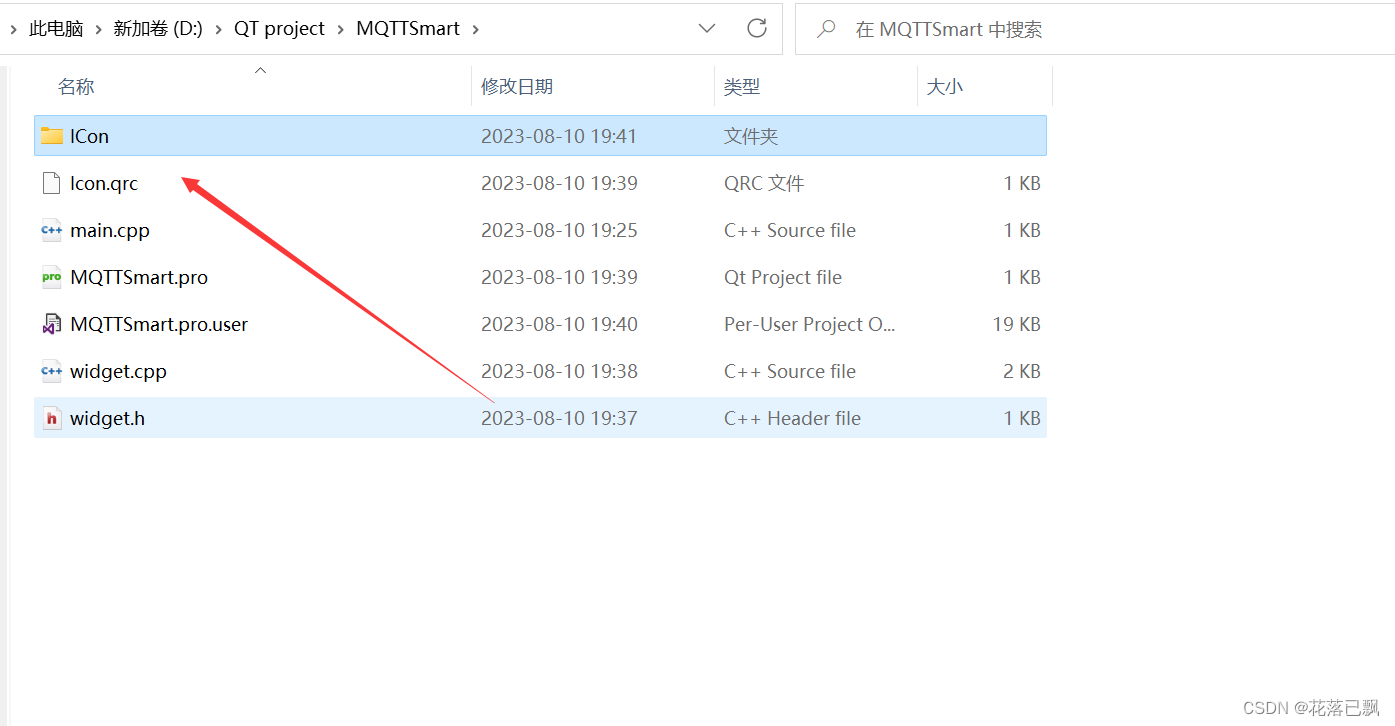
将文件放入目录中:
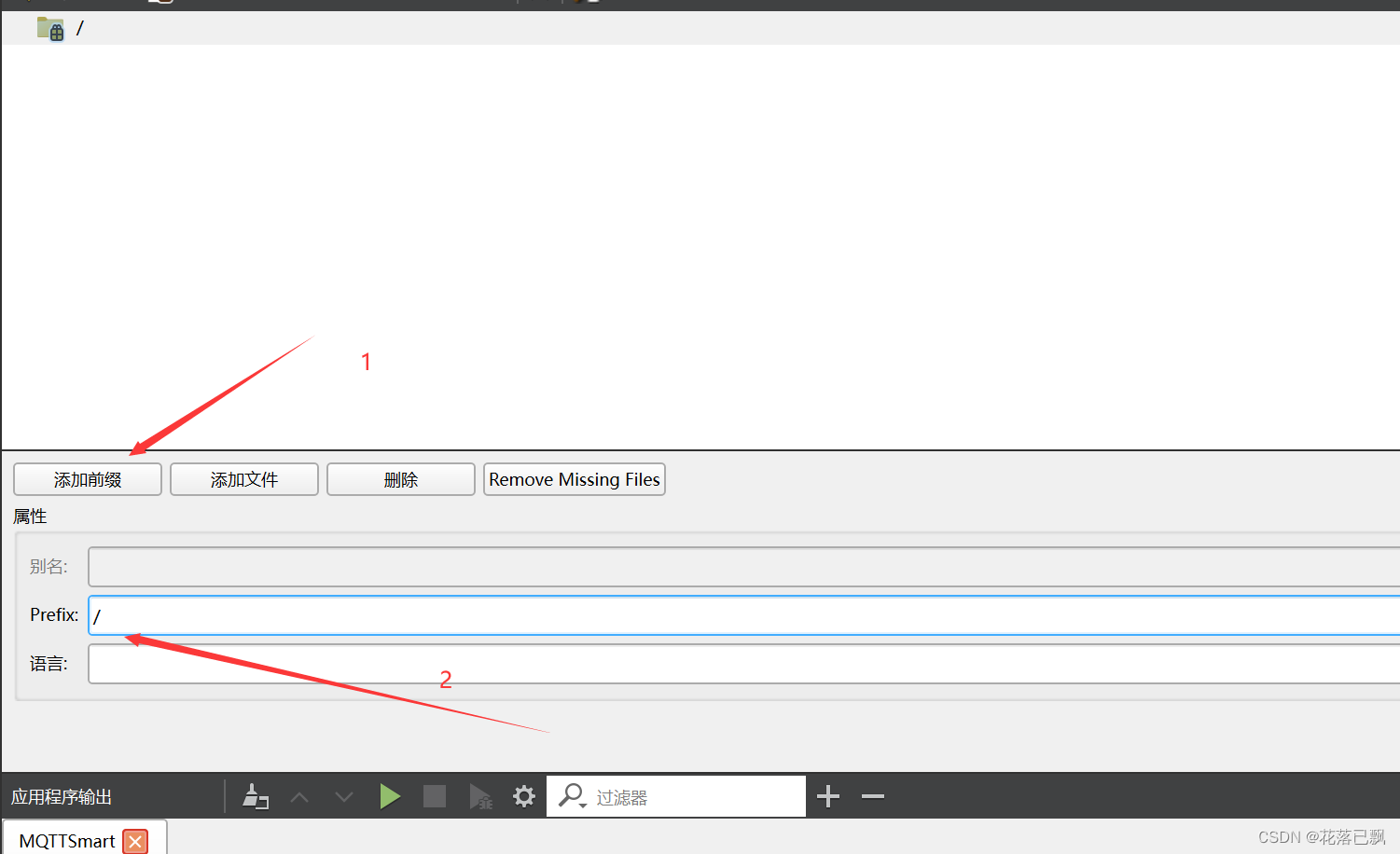
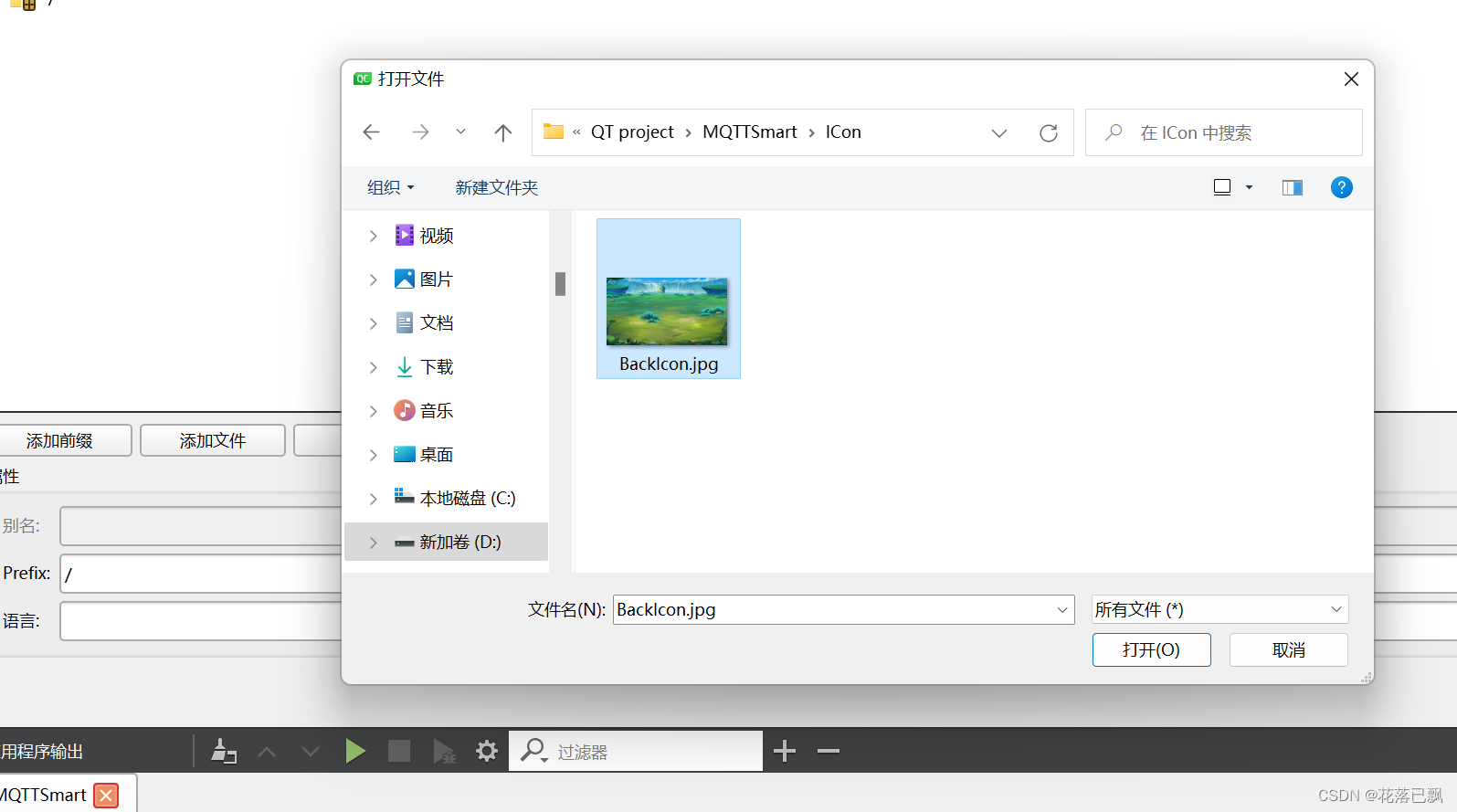
将图片添加进入资源文件中:
二、界面布局准备工作
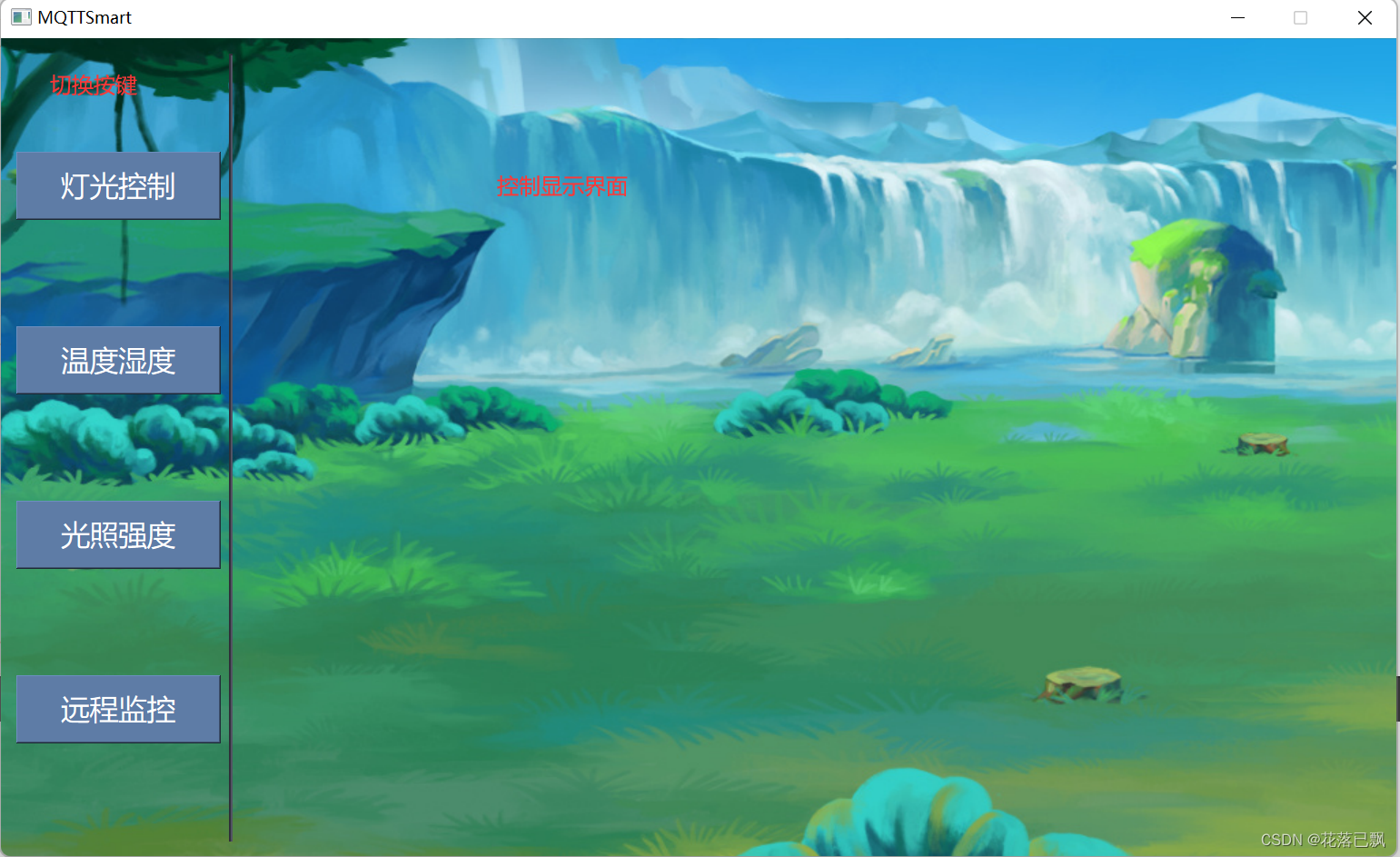
这里我们一共显示4个界面:LED控制界面,温度湿度显示界面,光照强度显示界面,摄像头监测界面。
所以这里需要有4个QWidget来显示对应的界面,考虑到要对这四个界面进行切换,这里会使用到QStackedLayout将四个界面进行管理。
同时需要添加四个按键,使用按键来切换到对应的界面。
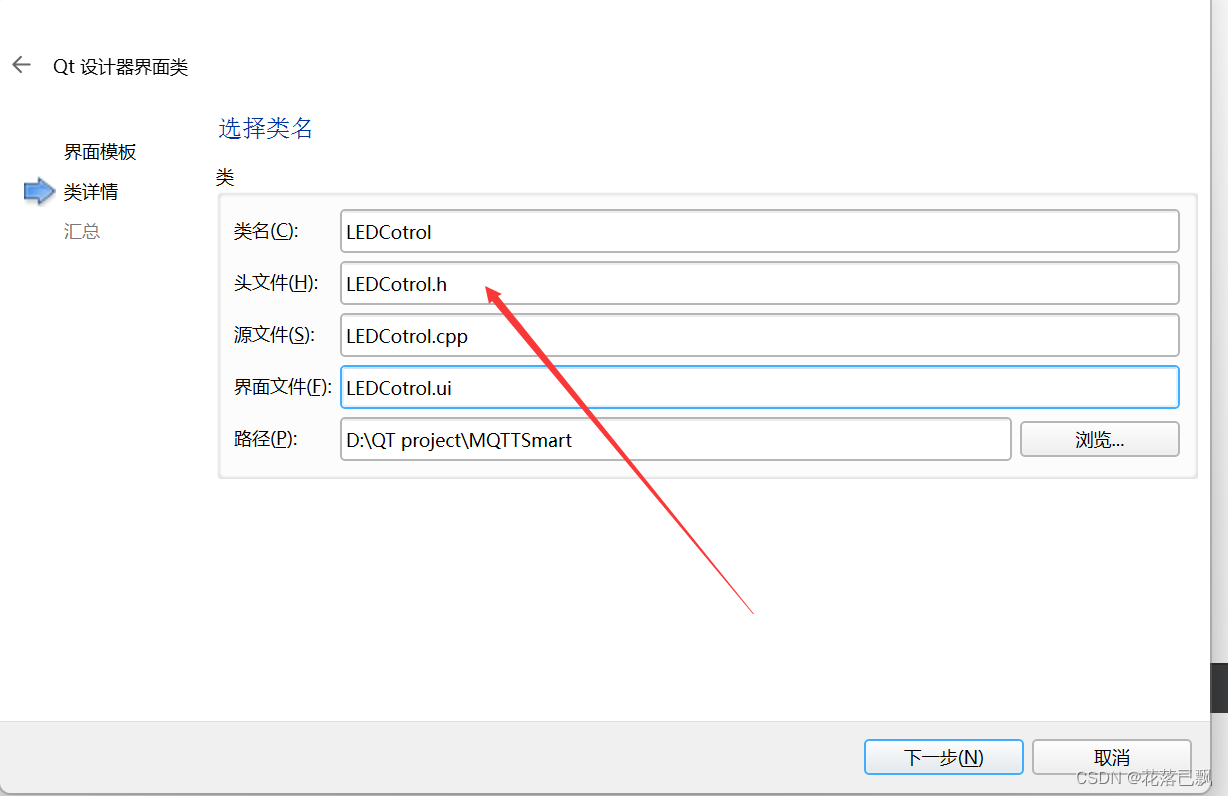
首先添加4个界面文件:
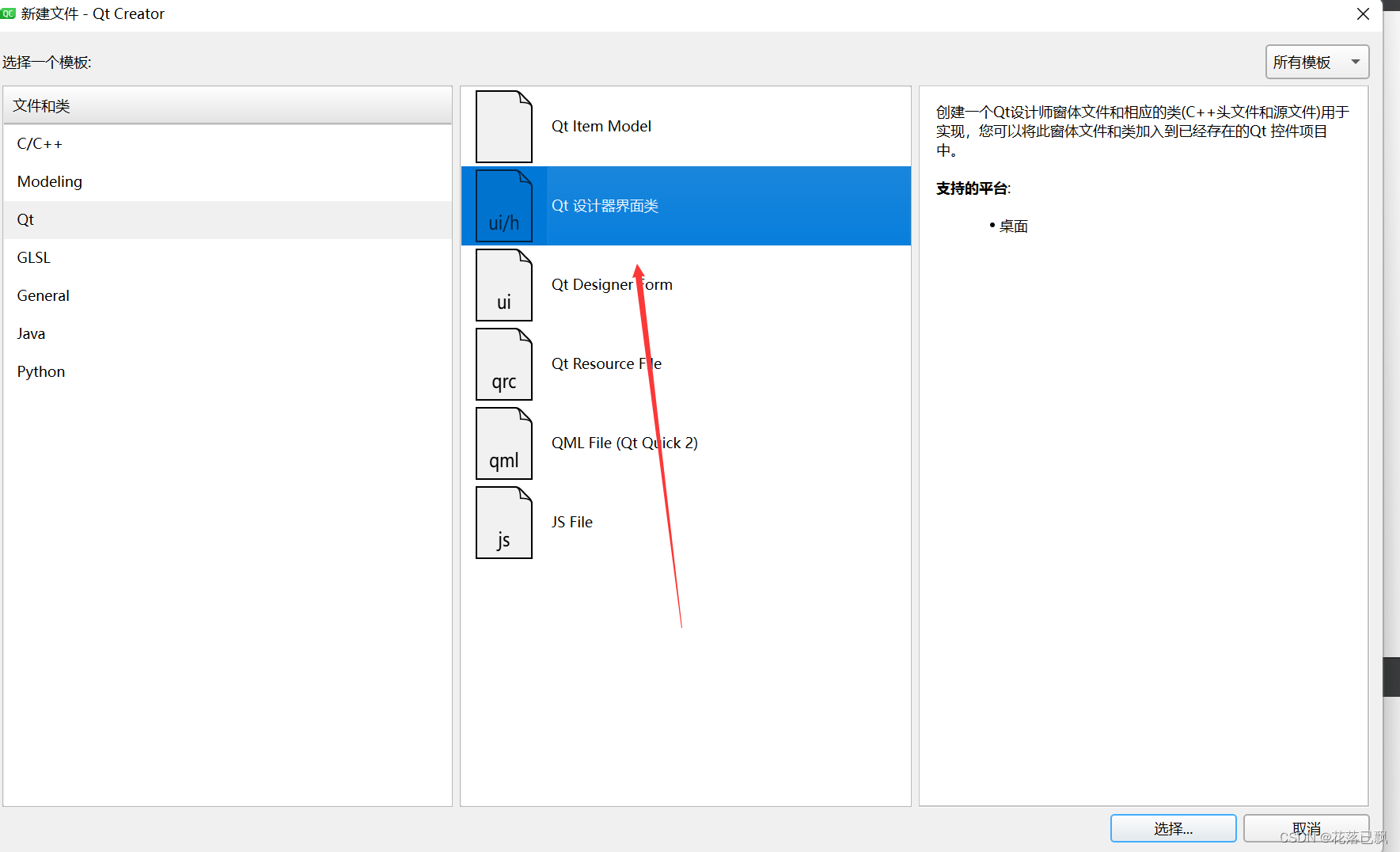
设置界面为Widget类型:
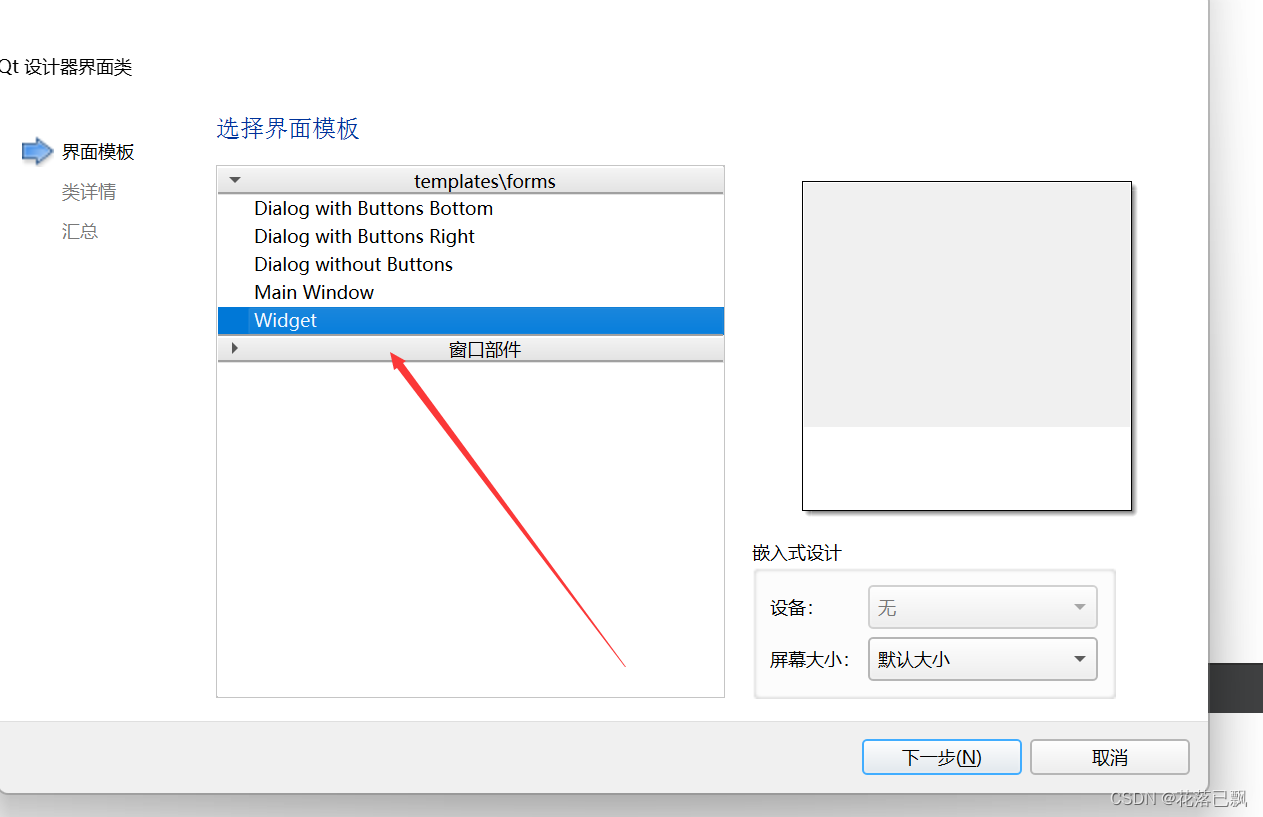
其他的三个界面也是如此添加。
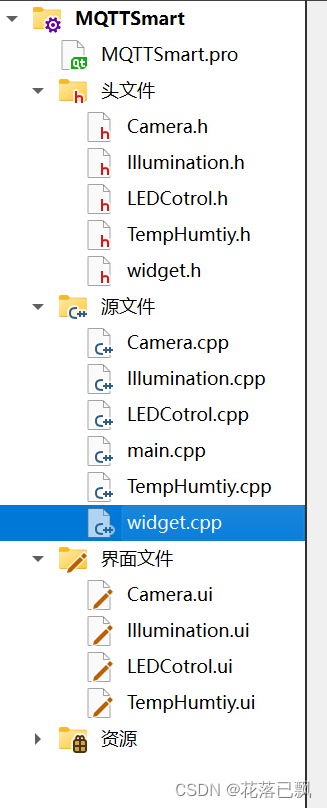
界面布局我们需要使用到的文件:
三、正式界面布局
代码部分注释写的非常详细了,这里就不多介绍了。
widget.h:
#ifndef WIDGET_H
#define WIDGET_H#include <QWidget>
#include <QPushButton>
#include <QStackedLayout>
#include "LEDCotrol.h"
#include "TempHumtiy.h"
#include "Illumination.h"
#include "Camera.h"class Widget : public QWidget
{Q_OBJECTQPushButton* LEDbutton;//LED按键QPushButton* TempHumtiybutton;//温度湿度按键QPushButton* illuminationbutton;//光照强度按键QPushButton* Camerabutton;//摄像头按键LEDCotrol* LEDUI;//LED界面TempHumtiy* TempHumtiyUI;//温度湿度界面Illumination* illuminationUI;//光照强度界面Camera* CameraUI;//摄像头界面QStackedLayout* m_stacklayout;//栈式布局管理器void BackSet(QString path);//背景图设置void ButtonStyleSet(QPushButton* button, QString Buttonname);//按键样式设置void AllButtonStyleSet();//全部按键样式设置public:Widget(QWidget *parent = nullptr);~Widget();protected slots:void LEDButtonClick();//LED按键槽函数void TempHumtiyButtonClick();//温度湿度槽函数void illuminationButtonClick();//光照强度槽函数void CameraButtonClick();//摄像头槽函数void ConnectSlot(void);//连接信号与槽
};
#endif // WIDGET_Hwidget.cpp:
#include "widget.h"
#include <QHBoxLayout>
#include <QVBoxLayout>
#include <QFrame>Widget::Widget(QWidget *parent): QWidget(parent)
{QVBoxLayout* vlayout = new QVBoxLayout();LEDbutton = new QPushButton();//LED按键TempHumtiybutton = new QPushButton();//温度湿度按键illuminationbutton = new QPushButton();//光照强度按键Camerabutton = new QPushButton();//摄像头按键/*让四个按键垂直布局*/vlayout->addWidget(LEDbutton);vlayout->addWidget(TempHumtiybutton);vlayout->addWidget(illuminationbutton);vlayout->addWidget(Camerabutton);// 创建一个 label 作为竖直分隔线// 设置背景颜色或样式,以使其看起来像一根线// 创建一条竖直分隔线QFrame* Vertical_line = new QFrame();Vertical_line->setFrameShape(QFrame::VLine);Vertical_line->setFrameShadow(QFrame::Sunken);Vertical_line->setStyleSheet("QFrame { background-color: rgb(71, 72, 86); }");LEDUI = new LEDCotrol();//LED界面TempHumtiyUI = new TempHumtiy();//温度湿度界面illuminationUI = new Illumination();//光照强度界面CameraUI = new Camera();//摄像头界面/*使用栈式布局管理器管理界面*/m_stacklayout = new QStackedLayout();m_stacklayout->addWidget(LEDUI);m_stacklayout->addWidget(TempHumtiyUI);m_stacklayout->addWidget(illuminationUI);m_stacklayout->addWidget(CameraUI);QHBoxLayout* hlaout = new QHBoxLayout(this);hlaout->addLayout(vlayout);hlaout->addWidget(Vertical_line);hlaout->addLayout(m_stacklayout);/*设置界面为固定大小*/setFixedSize(1024, 600);/*设置对应的背景图*/BackSet(":/ICon/BackIcon.jpg");/*全部按键样式设置*/AllButtonStyleSet();/*连接信号与槽*/ConnectSlot();
}/*连接信号与槽*/
void Widget::ConnectSlot(void)
{connect(LEDbutton, SIGNAL(clicked()), this, SLOT(LEDButtonClick()));connect(TempHumtiybutton, SIGNAL(clicked()), this, SLOT(TempHumtiyButtonClick()));connect(illuminationbutton, SIGNAL(clicked()), this, SLOT(illuminationButtonClick()));connect(Camerabutton, SIGNAL(clicked()), this, SLOT(CameraButtonClick()));
}/** 设置界面背景图* path:资源文件路径
*/
void Widget::BackSet(QString path)
{// 设置 QWidget 的背景图QPixmap pixmap(path);QPalette palette;palette.setBrush(backgroundRole(), QBrush(pixmap));setPalette(palette);setAutoFillBackground(true);
}/** 设置按键样式* button:要设置的按键* Buttonname:按键名字
*/
void Widget::ButtonStyleSet(QPushButton* button, QString Buttonname)
{button->setText(Buttonname);button->setFixedSize(150, 50);button->setStyleSheet("font-size: 16pt");button->setStyleSheet("background-color: rgb(94, 124, 166); font-size: 16pt; color: rgb(255, 255, 255);");
}/*全部按键样式设置*/
void Widget::AllButtonStyleSet()
{ButtonStyleSet(LEDbutton, "灯光控制");ButtonStyleSet(TempHumtiybutton, "温度湿度");ButtonStyleSet(illuminationbutton, "光照强度");ButtonStyleSet(Camerabutton, "远程监控");
}//LED按键槽函数
void Widget::LEDButtonClick()
{m_stacklayout->setCurrentWidget(LEDUI);
}//温度湿度槽函数
void Widget::TempHumtiyButtonClick()
{m_stacklayout->setCurrentWidget(TempHumtiyUI);
}//光照强度槽函数
void Widget::illuminationButtonClick()
{m_stacklayout->setCurrentWidget(illuminationUI);
}//摄像头槽函数
void Widget::CameraButtonClick()
{m_stacklayout->setCurrentWidget(CameraUI);
}Widget::~Widget()
{
}实现效果:
总结
本篇文章就讲解到这里,下篇文章我们完成LED,温度湿度控制等界面的设计。